Локальный вертикальный угол возвышения, область значений и азимут
elevation будет удален в будущем релизе. Использование geodetic2aer вместо этого.
Контрольная точка приходит второй в geodetic2aer список аргументов и выходные параметры упорядочены по-другому. Заменяющий шаблон:
[azimuthangle, elevationangle, slantrange] = geodetic2aer(lat2, lon2, alt2, lat1, lon1, alt1, spheroid, ...)
В отличие от elevation, geodetic2aer требует сфероидального входа, и это должен быть oblateSpheroid, referenceEllipsoid, или referenceSphere объект, не 2 1 вектор эллипсоида.
Можно использовать следующие шаги, чтобы преобразовать вектор эллипсоида, ellipsoid, к oblateSpheroid объект, spheroid:
spheroid = oblateSpheroid;
spheroid.SemimajorAxis = ellipsoid(1);
spheroid.Eccentricity = ellipsoid(2);
Когда вертикальное изменение вызвано только 6 входными параметрами, опорный эллипсоид GRS 80, в метрах, используется по умолчанию. Чтобы заменить это использование, используйте referenceEllipsoid('GRS80','meters') когда сфероид вводится для geodetic2aer.
Если angleunits вход включен, он должен следовать за spheroid введите в вызове geodetic2aer, вместо того, чтобы предшествовать ему.
Можно задать lengthunits параметр при вызове elevation, но geodetic2aer не имеет такого входа. Вместо этого установите LengthUnit свойство входного сфероида к требуемому значению. В этом случае referenceEllipsoid или referenceSphere объект должен использоваться (не oblateSpheroid объект.
[elevationangle,slantrange,azimuthangle]
= ...
elevation(lat1,lon1,alt1,lat2,lon2,alt2)
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,...
angleunits)
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,...
angleunits,distanceunits)
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,...
angleunits,ellipsoid)
[elevationangle,slantrange,azimuthangle]
= ... вычисляет угол возвышения, наклонную область значений и угол азимута точки 2 (с геодезическими координатами
elevation(lat1,lon1,alt1,lat2,lon2,alt2)lat2, lon2, и alt2) как просматривается от точки 1 (с геодезическими координатами lat1, lon1, и alt1). Координаты alt1 и alt2 эллипсоидальные высоты. Угол возвышения является углом угла обзора выше локальной горизонтали в точке 1. Наклонная область значений является 3D Декартовым расстоянием между точкой 1 и точкой 2. Азимут является углом с севера к проекции угла обзора на локальной горизонтали. Углы находятся в модулях степеней; высоты и расстояния исчисляются в метрах. Фигура земли является эллипсоидом по умолчанию (GRS 80).
Входные параметры могут быть векторами из точек или массивами любой формы, но должны соответствовать в размере за следующим исключением: Вертикальное изменение, область значений и азимут от одной точки до набора точек могут быть вычислены очень эффективно путем обеспечения скалярных координатных входных параметров для точки 1 и векторов или массивов для точки 2.
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,... где
angleunits)angleunits задает модули углов ввода и вывода. Если вы не используете angleunits, 'degrees' принят.
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,... где
angleunits,distanceunits)distanceunits задает модули наклонной области значений и высота. Если вы не используете distanceunits, 'meters' значение по умолчанию. Любое модульное значение, распознанное unitsratio может использоваться.
[...] = elevation(lat1,lon1,alt1,lat2,lon2,alt2,... использование
angleunits,ellipsoid)ellipsoid задавать эллипсоид. ellipsoid referenceSphere, referenceEllipsoid, или oblateSpheroid объект или вектор из формы [semimajor_axis eccentricity]. Если ellipsoid предоставляется, высоты должны быть в тех же модулях как полуглавная ось, и наклонная область значений будет возвращена в этих модулях. Если ellipsoid не использован, значением по умолчанию является сфера единичного радиуса. Расстояния исчисляются в метрах, если в противном случае не задано.
Примечание
Углы азимута угла обзора возвращены elevation будет обычно отличаться немного от соответствующих выходных параметров azimuth и distance, за исключением больших круговых азимутов на сферической земле.
Найдите угол возвышения точки 90 степенями от наблюдателя, принимающего, что наблюдатель и цель оба на 1 000 км выше Земли.
lat1 = 0; lon1 = 0; alt1 = 1000*1000; lat2 = 0; lon2 = 90; alt2 = 1000*1000; elevang = elevation(lat1,lon1,alt1,lat2,lon2,alt2) elevang = -45
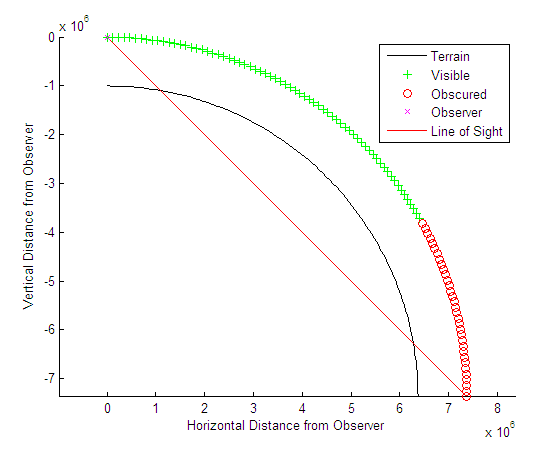
Визуально проверяйте результат с помощью los2 функция угла обзора. Создайте сетку данных нулей, чтобы представлять поверхность Земли. los2 функция без выходных аргументов создает фигуру, отображающую геометрию.
Z = zeros(180,360); refvec = [1 90 -180]; los2(Z,refvec,lat1,lon1,lat2,lon2,alt1,alt1);