Переменное смещение двунаправленный тепловой жидкий двигатель
Simscape / Жидкости / Тепловая Жидкость / Pumps & Motors

Блок Variable-Displacement Motor представляет устройство, которое извлекает мощность из тепловой жидкой сети и поставляет ее вращением в механическую сеть. Перемещение мотора варьируется в процессе моделирования согласно входу физического сигнала, заданному в порте D.
Порты A и B представляют моторные входы. Порты R и C представляют приводной вал и случай. Во время нормального функционирования перепад давления от порта A до порта B вызывает положительную скорость потока жидкости от порта A до порта B и положительного вращения вала двигателя относительно моторного случая. Этот режим работы упомянут здесь как прямое движение.
Режимы работы
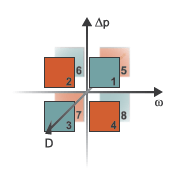
Блок имеет восемь режимов работы. Рабочий режим зависит от перепада давления от порта A до порта B, Δp = p B – p A; скорость вращения, ω = ω R – ω C; и жидкое объемное смещение в порте D. Фигура выше сопоставляет эти режимы с октантами Δp-ω-D график:
Режим 1, Прямое движение: Теките из порта A к причинам порта B уменьшение давления от A до B и положительной угловой скорости вала.
Режим 2, Реверсивный насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к порту A.
Режим 3, Реверсивный мотор: Теките из порта B к причинам порта A уменьшение давления от B до A и отрицательной угловой скорости вала.
Режим 4, Прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A до порта B, и теките из A к B.
Режим 5, Реверсивный насос: Положительная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к A.
Режим 6, Прямое движение: Теките из порта A к причинам порта B уменьшение давления от A до B и положительной угловой скорости вала.
Режим 7, Прямой насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта A до порта B, и теките из A к B.
Режим 8, Реверсивный мотор: Теките из B к причинам A уменьшение давления от B до A и положительной угловой скорости вала.
Время отклика двигателя рассматривается незначительным по сравнению со временем отклика системы. Принято, что Мотор достигает устойчивого состояния почти мгновенно и описан как квазистационарный компонент.
Массовый расход жидкости, сгенерированный в двигателе,
где:
фактический массовый расход жидкости.
идеальный массовый расход жидкости.
внутренняя утечка mas скорость потока жидкости.
Крутящий момент на моторе
где:
τ является фактическим крутящим моментом.
Идеал τ является идеальным крутящим моментом.
Трение τ является моментом трения.
Идеальный массовый расход жидкости
и идеальный крутящий момент мотора
где:
ρ является средним значением плотности жидкости в тепловых гидравлических портах A и B.
D Находился, сглаживавшее смещение, вычисленное, чтобы удалить числовые разрывы между отрицательными и прямыми вытеснениями.
ω является угловой скоростью вала.
Δp является перепадом давления между входным и выходным отверстиями.
Смещение насыщения задано как:
где:
D является перемещением, определенным в порте D физического сигнала.
Порог D является заданным значением параметров блоков Displacement threshold for motor-pump transition.
Можно параметрировать утечку и трение аналитически, с помощью сведенных в таблицу КПД или потерь, или входными КПД или ввести потери.
Когда вы устанавливаете Leakage and friction parameterization на Analytical уровень утечек
и момент трения
где:
K HP является коэффициентом Хагена-Пуазейля для ламинарных течений в трубе. Этот коэффициент вычисляется из заданных номинальных параметров.
μ является динамической вязкостью тепловой жидкости, взятой здесь в качестве среднего значения ее значений в тепловых гидравлических портах.
k является моментом трения по сравнению с коэффициентом перепада давления в номинальном смещении, которое определяется из Mechanical efficiency at nominal conditions, ηm,nom:
τfr,nom является моментом трения при номинальных условиях:
Имя D является заданным значением параметров блоков Nominal Displacement.
τ 0 является заданным значением параметров блоков No-load torque.
Имя ω является заданным значением параметров блоков Nominal shaft angular velocity.
Имя Δp является заданным значением параметров блоков Nominal pressure drop. Это - перепад давления, при котором задан номинальный объемный КПД.
Коэффициент Хагена-Пуазейля определяется из номинальных параметров компонента жидкости уравнением
где:
Имя ω является заданным значением параметра Nominal shaft angular velocity. Это - скорость вращения, при которой задан номинальный объемный КПД.
Имя μ является заданным значением параметров блоков Nominal Dynamic viscosity. Это - динамическая вязкость, при которой задан номинальный объемный КПД.
η v, Имя является заданным значением параметров блоков Volumetric efficiency at nominal conditions. Это - объемный КПД, соответствующий заданным номинальным условиям.
Когда вы устанавливаете Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies, уровень утечек
и момент трения
где:
α является числовым параметром сглаживания для перехода режима мотор-насос.
расход утечек в моторном режиме.
уровень утечек в режиме насоса.
Трение τ, Двигатель является моментом трения в моторном режиме.
Трение τ, Насос является моментом трения в режиме насоса.
Параметр сглаживания α дан гиперболической функцией тангенса
где:
Порог Δp является заданным значением параметров блоков Pressure gain threshold for pump-motor transition.
Порог ω является заданным значением параметров блоков Angular velocity threshold for pump-motor transition.
Порог D является заданным значением параметров блоков Angular velocity threshold for motor-pump transition.
Уровень утечек вычисляется от объемного КПД, количество, которое задано в табличной форме по Δp –ɷ–D область через параметры блоков Volumetric efficiency table. При работе в режиме насоса (квадранты 1 и 3 Δp –ɷ–D график, показанный в карте Режимов работы), уровень утечек:
то, где η v является объемным КПД, получило или интерполяцией или экстраполяцией табличных данных. Точно так же при работе в моторном режиме (квадранты 2 и 4 Δp –ɷ–D график), уровень утечек:
Момент трения так же вычисляется от механического КПД, количество, которое задано в табличной форме по Δp –ɷ–D область через параметры блоков Mechanical efficiency table. При работе в режиме насоса (квадранты 1 и 3 Δp –ɷ–D график):
то, где η m является механическим КПД, получило или интерполяцией или экстраполяцией табличных данных. Точно так же при работе в моторном режиме (квадранты 2 и 4 Δp –ɷ–D график):
Когда вы устанавливаете Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses, утечка (объемная) скорость потока жидкости задана непосредственно в табличной форме по Δp –ɷ–D область:
Массовый расход жидкости из-за утечек вычисляется из объемного расхода:
Момент трения так же задан в табличной форме:
где Утечка q (Δp, ω) и Трение τ (Δp, ω) является объемными и механическими потерями, полученными посредством интерполяции или экстраполяции табличных данных, заданных через параметры блоков Mechanical loss table и Volumetric loss table.
Когда вы устанавливаете Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies, расчет расхода утечки и момента трения кручения идентичен Tabulated data - volumetric and mechanical efficiencies установка. Объемные и механические интерполяционные таблицы КПД заменяются входными параметрами физического сигнала, которые вы задаете через порты EV и EM.
КПД являются положительными количествами со значением между 0 и 1. Входные значения за пределами этих границ установлены равные связанному самому близкому (0 для входных параметров, меньших, чем 0, 1 для входных параметров, больше, чем 1). Другими словами, сигналы КПД насыщаются в 0 и 1.
Когда вы устанавливаете Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies, расчет расхода утечки и момента трения кручения идентичен Tabulated data - volumetric and mechanical efficiencies установка. Объемные и механические интерполяционные таблицы потерь заменяются входными параметрами физического сигнала, которые вы задаете через порты LV и LM.
Блок игнорирует знак входа. Блок устанавливает знаки автоматически от условий работы, установленных в процессе моделирования — более точно от Δp –ɷ квадрант, в котором компонент, оказывается, действует.
Механизированный труд, сделанный двигателем, сопоставлен с энергетическим обменом. Управляющее энергетическое уравнение баланса:
где:
Φ A и Φ B является энергетическими скоростями потока жидкости в портах A и B, соответственно.
Гидро P является функцией перепада давлений между моторными портами: .
Моторная механическая энергия произведена должная закрутить, τ, и скорость вращения, ω:
Сжимаемость жидкости незначительна.
Нагрузки на валу мотора от инерции, трения и сил упругости незначительны.
Leakage and friction parameterization — Параметризация уровня утечек и момента тренияAnalytical (значение по умолчанию) | Tabulated data - volumetric and mechanical efficiencies | Tabulated data - volumetric and mechanical losses | Input signal - volumetric and mechanical efficiencies | Input signal - volumetric and mechanical lossesМетод, чтобы вычислить потери скорости потока и крутящего момента из-за внутренних утечек и трения. Когда вы выбираете Analytical, параметры блоков общедоступны из таблиц данных компонента. Когда вы выбираете Tabulated data - volumetric and mechanical efficiencies или Tabulated data - volumetric and mechanical losses, блок использует интерполяционные таблицы, чтобы сопоставить перепад давления, скорость вращения и смещение к КПД или потерям компонента.
Когда вы выбираете Input signal - volumetric and mechanical efficiencies или Input signal - volumetric and mechanical losses, блок выполняет расчет расхода утечки и момента трения кручения то же самое как Tabulated data - volumetric and mechanical efficiencies или Tabulated data - volumetric and mechanical losses настройки, соответственно, и блок включают порты физического сигнала, EV и EM. Вы используете эти порты, чтобы задать объемный и механический КПД.
Nominal displacement — Смещение, в котором можно задать объемный КПДcm^3/rev (значение по умолчанию) | положительная скалярная величинаЖидкое смещение для данного объемного КПД. Эти значения обычно доступны в стандартных условиях работы в таблице данных производителя. Блок использует этот параметр, чтобы вычислить уровень утечек и момент трения.
Nominal shaft angular velocity — Угловая скорость вала для данного объемного КПДrpm (значение по умолчанию) | скалярУгловая скорость вращения вала, которая соответствует данному объемному КПД. Эти значения обычно доступны в стандартных условиях работы в таблице данных производителя. Блок использует этот параметр, чтобы вычислить уровень утечек и момент трения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Nominal pressure drop — Перепад давления для соответствующего объемного КПДMPa (значение по умолчанию) | скалярПерепад давления, который соответствует данному объемному КПД. Эти значения обычно доступны в стандартных условиях работы в таблице данных производителя. Блок использует этот параметр, чтобы вычислить уровень внутренних утечек.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Nominal dynamic viscosity — Динамическая вязкость, при которой можно задать объемный КПДcP (значение по умолчанию) | скалярДинамическая вязкость гидравлической жидкости для данного объемного КПД. Эти значения обычно доступны в стандартных условиях работы в таблице данных производителя. Блок использует этот параметр, чтобы вычислить уровень внутренних утечек.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Volumetric efficiency at nominal conditions — Объемный КПД при заданных номинальных условияхОбъемный КПД для данных условий. Блок задает объемный КПД как отношение фактических к идеальным объемным расходам. Эти значения обычно доступны в стандартных условиях работы в таблице данных производителя. Блок использует этот параметр, чтобы вычислить уровень внутренних утечек.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Mechanical efficiency at nominal conditions — Отношение фактических к идеальной механической энергииОтношение фактической механической энергии к идеальной механической энергии при номинальных условиях.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
No-load torque — Минимальный крутящий момент, требуемый вызвать вращение валаN*m (значение по умолчанию) | скалярЗакрутите, чтобы преодолеть трение изоляции и вызвать вращение механического вала. Этот крутящий момент является независимым от компонента нагрузки общего момента трения кручения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Pressure drop vector for efficiencies, dp — Перепады давления для объемного данного и механический КПДMPa (значение по умолчанию) | векторПерепады давления для соответствующих табличных данных о КПД. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Shaft angular velocity vector for efficiencies, w — Скорости вращения, при которых можно задать объемное и механический КПДrad/s | векторУгловые скорости вала для соответствующих табличных данных о КПД. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Displacement vector for efficiencies, D — Смещения, в которых можно задать объемное и механический КПДcm^3/rev (значение по умолчанию)Смещения, в которых можно задать табличные данные КПД. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Volumetric efficiency table, e_v(dp,w) — Объемные КПД для данных перепадов давления, скоростей вращения и смещенийrepmat([.816, .908, .954, .977, .981, .984; .325, .663, .831, .916, .925, .946; .137, .568, .78, .892, .893, .91], 1, 1, 4) | матрицаОбъемные КПД при заданных перепадах давления жидкости, угловых скоростях вала и смещениях. КПД должны быть в области значений 0–1. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M является количеством векторных элементов в параметре Pressure drop vector for efficiencies, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector for efficiencies, w.
L является количеством векторных элементов в параметре Displacement vector for efficiencies, D.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Mechanical efficiency table, e_m(dp,w) — Механический КПД для данных перепадов давления, скоростей вращения и смещенийrepmat([.996, .996, .996, .996, .996, .996; .988, .989, .989, .989, .989, .99; .981, .981, .982, .982, .983, .984], 1, 1, 4) | матрицаМеханический КПД, соответствующий заданным перепадам давления жидкости, угловым скоростям вала и смещениям. КПД должны быть в области значений 0–1. M, N и L являются размерами заданных векторов интерполяционной таблицы:
M является количеством векторных элементов в параметре Pressure drop vector for efficiencies, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector for efficiencies, w.
L является количеством векторных элементов в параметре Displacement vector for efficiencies, D.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Pressure drop vector for losses, dp — Перепад давления за соответствующие потериMPa (значение по умолчанию)Перепады давления для соответствующих табличных данных потерь. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses.
Shaft angular velocity vector for losses, w — Скорость вала за соответствующие потериrad/s (значение по умолчанию)Угловая скорость вала для соответствующих табличных данных потерь. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses.
Displacement vector for losses, D — Смещения, в которых можно задать объемные и механические потериcm^3/rev (значение по умолчанию)Смещения, в которых можно задать табличные данные потерь. Вектор должен быть по крайней мере двумя элементами в строго увеличивающемся порядке.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses.
Volumetric loss table, q_loss(dp,w) — Расход внутренних утечек для соответствующих перепадов давления, скоростей вращения и смещенийrepmat([.0282, .0253, .0241, .0235, .0291, .0325; .2596, .1271, .1017, .0917, .1216, .1142; .7874, .1901, .141, .1211, .1797, .1978] * 1e-3, 1, 1, 4)
m^3/sОбъемные потери при заданных перепадах давления жидкости, угловых скоростях вала и смещениях. Блок задает объемную потерю расход внутренних объемных утечек между портом A и портом B. M и N являются размерами заданных векторов интерполяционной таблицы:
M является количеством векторных элементов в параметре Pressure drop vector for losses, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector for losses, w.
Можно задать данные для одного квадранта, (ɷ, Δp, D). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses.
Mechanical loss table, torque_loss(dp,w) — Моменты трения для соответствующих перепадов давления, скоростей вращения и смещенийrepmat([.002, .002, .002, .002, .002, .002; .06, .055, .055, .055, .055, .05; .19, .19, .18, .18, .17, .16], 1, 1, 4)
N*mМеханические потери для данных перепадов давления, угловых скоростей вала и смещений. Блок задает механическую потерю как момент трения из-за изоляций и внутренних компонентов. M и N являются размерами заданных векторов интерполяционной таблицы:
M является количеством векторных элементов в параметре Pressure drop vector for losses, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector for losses, w.
Можно задать данные для одного квадранта, (ɷ, Δp). Обратитесь к описанию блока для режимов работы, соответствующих различным квадрантам. Табличные данные за механические потери должны выполнить соглашение на рисунке с положительными значениями при положительных скоростях вращения и отрицательными величинами при отрицательных скоростях вращения.

Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical losses.
Minimum volumetric efficiency — Нижний предел насыщения входного сигнала объемного КПД1e-3 (значение по умолчанию) | скаляр в области значений (0,1)Наименьшее допустимое значение объемного КПД. Вход от порта EV физического сигнала насыщает входные параметры ниже этого значения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Maximum volumetric efficiency — Верхний предел насыщения входного сигнала объемного КПДНаибольшее допустимое значение объемного КПД. Вход от порта EV физического сигнала насыщает входные параметры выше этого значения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Minimum mechanical efficiency — Нижний предел насыщения входного сигнала объемного КПД1e-3 (значение по умолчанию) | скаляр в области значений (0,1)Наименьшее допустимое значение механического КПД. Вход от порта EM физического сигнала насыщает входные параметры ниже этого значения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Maximum mechanical efficiency — Верхний предел насыщения входного сигнала объемного КПДСамое большое позволенное значение механического КПД. Вход от порта EM физического сигнала насыщает входные параметры выше этого значения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Pressure drop threshold for motor-pump transition — Перепад давления, при котором можно инициировать плавный переход между режимами двигателя и насоса1e-3
MPa (значение по умолчанию) | скалярПерепад давления между входным и выходным отверстиями, ниже которого начинает переходить между моторным и насосным режимами блок. Блок использует гиперболическую функцию тангенса, чтобы сглаживать уровень утечек и момент трения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies или Input signal - volumetric and mechanical losses.
Angular velocity threshold for motor-pump transition — Скорость вращения, при которой можно инициировать плавный переход между насосом и моторными режимамиrad/s (значение по умолчанию) | скалярУгловая скорость вала, ниже которой начинает переходить между моторным и насосным режимами блок. Блок использует гиперболическую функцию тангенса, чтобы сглаживать уровень утечек и момент трения.
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies или Input signal - volumetric and mechanical losses.
Cross-sectional area at ports A and B — Площадь сечения входного и выходного отверстий компонентаm^2 (значение по умолчанию) | положительная скалярная величинаПлощадь сечения входного и выходного отверстий компонента. Области приняты равные.
Check if operating beyond the octants of supplied tabulated data — Режим предупреждения моделирования для условий работы вне области значений табличных данныхNone (значение по умолчанию) | WarningРежим предупреждения моделирования для условий работы вне области значений табличных данных. Выберите Warning чтобы уведомить, когда перепад давления жидкости, угловая скорость вала или мгновенное смещение выходят за пределы заданных табличных данных. Предупреждение не заставляет симуляцию останавливаться.
Чтобы включить этот параметр, установите Leakage and friction parameterization на:
Tabulated data - volumetric and mechanical efficiencies
Tabulated data - volumetric and mechanical losses
Input signal - volumetric and mechanical efficiencies
Input signal - volumetric and mechanical losses
Check if operating outside of motor mode — Режим предупреждения моделирования для условий работы вне моторного режимаNone (значение по умолчанию) | WarningРежим предупреждения моделирования для условий работы вне моторного режима. Блок генерирует предупреждение при переходе от моторного к насосному режиму. Выберите Warning чтобы уведомить, когда этот переход происходит. Предупреждение не заставляет симуляцию останавливаться.
Fixed-Displacement Pump (TL) | Fixed-Displacement Motor (TL)
