Можно изменить модель механизма от Пары Две Вращающейся Инерции с Простым примером Механизма и использовать его в качестве начальной точки для изучения комплексных наборов механизма. Один из самых важных комплексных наборов механизма является планетарным механизмом, который имеет три колеса, звонок, солнце и планету, все сохраненные на месте телом перевозчика. Планетарный механизм важен, потому что это - общий компонент в комплексных, реалистических передачах.
Начните с простой модели механизма, которую вы создали или путем открытия sdl_gear пример.
Замените Простой Механизм в своей модели с Planetary Gear от библиотеки блоков Simscape™ Driveline™. Планетарный механизм разделяет вход угловое движение от несущей между звонком и колесами солнца, каждый соединенный с их соответствующими телами.
Скопируйте Датчик (Последователь) подсистема, связанный блок Inertia и блок From.
Переименуйте подсистемы датчика, чтобы совпадать с механизмами, к которым они присоединяют: несущая, звонок и солнце. Переименуйте сигналы на Goto и От меток блока, чтобы совпадать с механизмами, которые представляют сигналы:
Для механизма несущей переименуйте сигналы тегов как wC и tC.
Для кольцевого механизма переименуйте сигналы тегов как wR и tR.
Для механизма солнца переименуйте сигналы тегов как wS и tS.
Добавьте вход в каждый из двух блоков Mux.
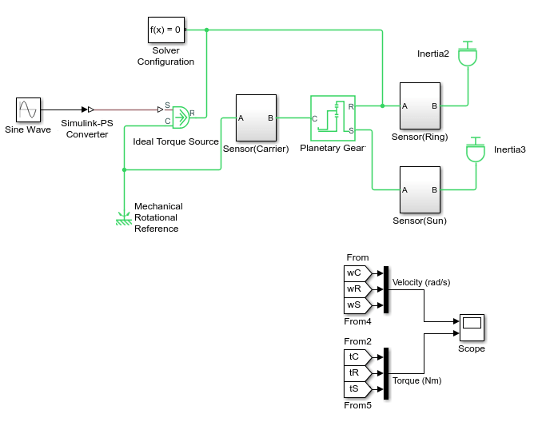
Соедините блоки, чтобы сформировать новую схему как показано на рисунке.
Простая планетарная модель механизма

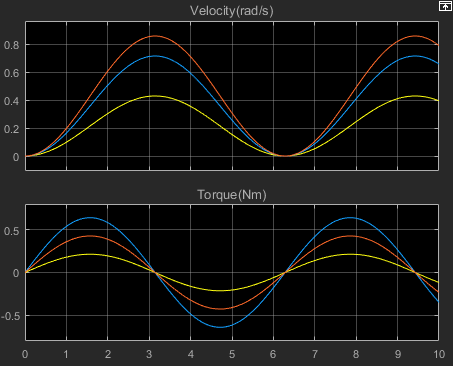
Откройте Осциллограф и запустите симуляцию, чтобы наблюдать скорости вращения звонка, несущей и солнца, от самого большого до самого маленького. Отношение звонка к скоростям механизма солнца всегда равняется 2.
Чтобы видеть звонок и одно только вращение колес солнца, необходимо заблокировать несущую. Сделать так:
Удалите блок Inertia1 и связанный коннектор.
Удалите коннектор между блоком Ideal Torque Source и Датчиком (Несущая) подсистема.
Соедините Датчик (Несущая) подсистема к коннектору между блоком Mechanical Rotational Reference и блоком Ideal Torque Source.
Соедините блок Ideal Torque Source с коннектором между блоком Planetary Gear и Датчиком (Звонок) подсистема.
Удалите коннектор, который соединяет блок Solver Configuration с коннектором между блоком Mechanical Rotational Reference и блоком Ideal Torque Source.
Измените местоположение блока Solver Configuration.
Соедините блок Solver Configuration с коннектором между блоком Ideal Torque Source и Датчиком (Звонок) подсистема.
Простая планетарная модель механизма с заблокированной несущей
Откройте Осциллограф и запустите вашу модель. Наблюдайте скорости вращения звонка, несущей и солнца.
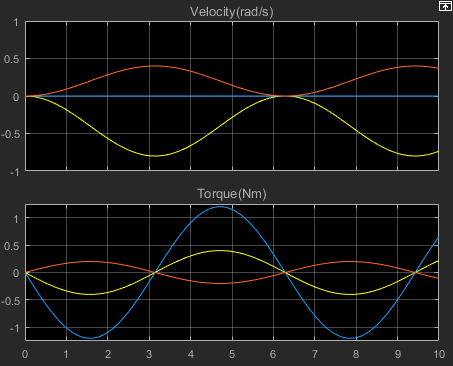
Несущая, соединенная со Ссылкой Вращательного механического устройства, не перемещается. Звонок управляется с синусоидальным крутящим моментом, и солнце отвечает путем вращения в противоположном направлении (звонок, и колеса механизма солнца являются внешними друг другу) на дважды уровне. Кольцевое колесо имеет дважды радиус (или дважды количество зубов) как солнце, таким образом, это вращается вдвое менее быстро.
