В этом примере показано, как симулировать системы, которые охватывают электрические и механические области. Вы изучаете, как смоделировать физические компоненты с блоками Simscape™, соединить их в реалистическую модель, используйте Simulink® блоки также, и затем симулируют и изменяют модель электродвигателя.
Модель основана на Микродвигателе DC Серии 0615 Faulhaber. Модель использует параметры эквивалентной схемы для 1.5-вольтового двигателя, чтобы проверить заключенную в кавычки производителями скорость без загрузок, ток без загрузок, и крутящий момент останова. Можно использовать модель, чтобы оценить моторную эффективность в данном приложении путем добавления необходимой механической модели загрузки.
Чтобы открыть Моторную модель Постоянного электромагнита в качестве примера, введите ssc_dcmotor в MATLAB® Командное окно.
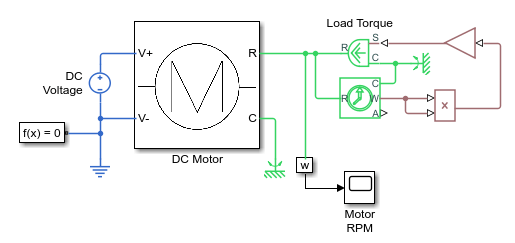
Основная модель
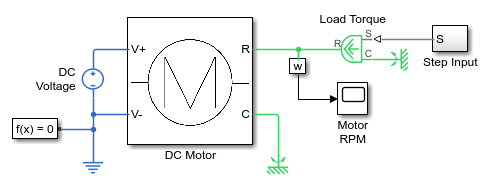
Модель содержит подсистему двигателя постоянного тока с двумя электрическими и двумя портами вращательного механического устройства.
Для улучшенной удобочитаемости блок-схем каждая область Simscape использует отличный цвет по умолчанию и стиль линии для линий связи. В этой блок-схеме, например, электрическая схема обозначается темно-синим цветом линий связи, в то время как линии связи между портами вращательного механического устройства являются светло-зелеными. Линии физического сигнала являются коричневыми.
Электрические порты моторного подключения к электрической схеме, которая состоит из блока Electrical Reference, представляя электрическую землю и 1,5-вольтовый источник напряжения постоянного тока.
На механической стороне блок Mechanical Rotational Reference представляет контрольную точку для других элементов.
Моторная загрузка представлена блоком под названием Крутящий момент нагрузки, который является блоком Ideal Torque Source. На одной стороне это соединяется с блоком Mechanical Rotational Reference и с другой стороны с валом двигателя. Крутящий момент нагрузки задан Входной подсистемой Шага, соединенной через физический сигнал с портом управления S блока Load Torque.
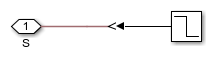
Входная подсистема Шага содержит регулярный источник Шага Simulink, который обеспечивает управляющий сигнал. Блок Simulink-PS Converter преобразует управляющий сигнал в физический сигнал и применяет его к порту управления блока Load Torque через блок S Connection Port.
Схема также содержит блок Solver Configuration, который требуется в любой модели Simscape. Это содержит параметры, относящиеся к числовым алгоритмам для симуляций Simscape.
Дважды кликните подсистему двигателя постоянного тока, чтобы открыть его.
Подсистема двигателя постоянного тока
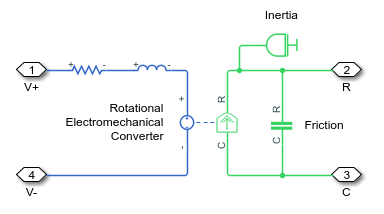
Двигатель состоит из электрической схемы и схемы вращательного механического устройства, соединенной блоком Rotational Electromechanical Converter. Электрическая схема состоит из блока Resistor и блока Inductor. Это содержит два электрических порта, соответствуя V + и электрические терминалы V-двигателя. Механическая схема содержит блок Rotational Friction, блок Inertia, и два порта вращательного механического устройства, C и R, соответствуя моторному случаю и ротору, соответственно. Заметьте, как порты C и R блока Rotational Friction и блока Rotational Electromechanical Converter соединяются с портами C и R двигателя, чтобы сохранить правильное направление переменных в физической сети.
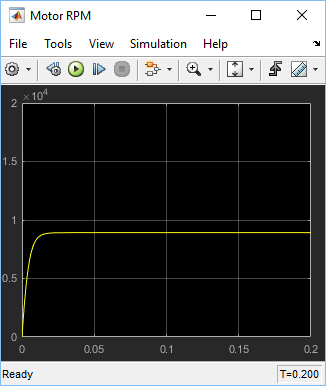
Дважды кликните Моторный осциллограф об/мин, чтобы открыть его. В процессе моделирования это окно отображает скорость вала в зависимости от времени.
Щелкните![]() , чтобы запустить симуляцию. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Этот процесс может занять несколько секунд. Сообщение в нижнем левом углу окна модели обеспечивает состояние.
, чтобы запустить симуляцию. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Этот процесс может занять несколько секунд. Сообщение в нижнем левом углу окна модели обеспечивает состояние.
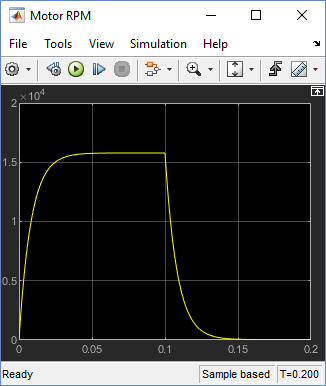
Исследуйте результаты симуляции в Моторном окне scope об/мин.
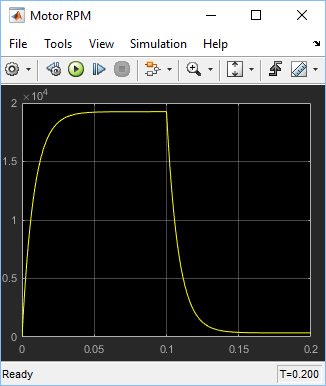
В течение первых 0,1 секунд двигатель не имеет никакой внешней загрузки и сборок скорости до значения без загрузок. Затем в 0,1 секунды, крутящий момент останова применяется как загрузка в вал двигателя. Увеличивание масштаб Моторного осциллографа об/мин показывает, что модель совпадает с параметрами производителя для скорости без загрузок и крутящего момента останова.
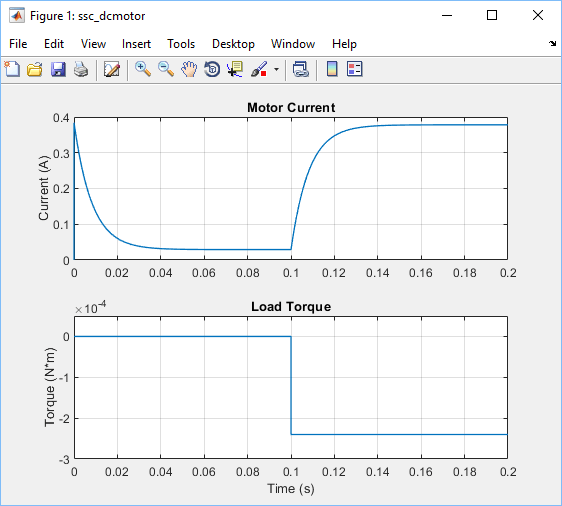
Модель в качестве примера также показывает, как можно использовать код MATLAB, чтобы анализировать результаты симуляции. Чтобы построить текущий и крутящий момент нагрузки, нажмите Plot гиперссылка в аннотации модели. Текущие показанные на рисунке соответствия параметры производителя для тока без загрузок.
Уменьшайте напряжение питания до 1,25 вольт (чтобы симулировать бег батареи) и варьироваться крутящий момент нагрузки, чтобы найти максимальный крутящий момент в этом пониженном напряжении.
Дважды кликните блок DC Voltage Source. Установите Constant voltage на 1.25 V.
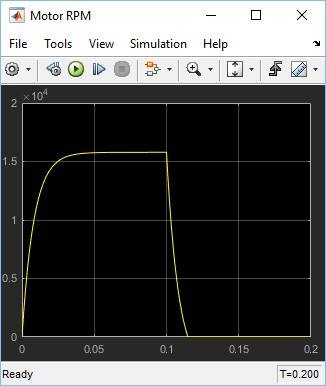
Запустите симуляцию. Отметьте эффект пониженного напряжения на скорости без загрузок.
Попытайтесь варьироваться крутящий момент нагрузки, чтобы найти максимальный крутящий момент в этом пониженном напряжении. Откройте Входную подсистему Шага и дважды кликните исходный блок Step. Введите различные окончательные значения для входного сигнала и повторно выполните симуляцию.
Следующий рисунок показывает результаты симуляции для набора Final value к -0.2e-3, который соответствует (1.25/1.5)*0.24mNm, когда величина кривой скорости крутящего момента пропорциональна напряжению для двигателя постоянного тока.
Замените источник крутящего момента на простую механическую загрузку, например, вентилятор, для которого крутящий момент задан alpha*speed^2, где alpha -1e-10 Nm / (rad/s) ^2.
Удалите Входную подсистему Шага из модели.
В библиотеке блоков Simscape откройте Foundation Library> Mechanical> Mechanical Sensors.
Перетащите блок Ideal Rotational Motion Sensor к окну модели.
Откройте Foundation Library> Physical Signals> Functions.
Перетащите блок PS Product и блок PS Gain к окну модели.
Соедините блоки как показано на следующем рисунке. Чтобы повернуть блок, выберите его и нажмите Ctrl+R.
Дважды кликните блок PS Gain, чтобы открыть его диалоговое окно. В первом окне редактирования рядом с параметром Gain введите значение -1e-10. Во втором поле комбинированного списка, с модулем выпадающий список, вводят модульное выражение N*m/(rad/s)^2 и нажмите OK.
Запустите симуляцию и оцените моторную эффективность с новой загрузкой.