Преобразуйте входной сигнал Simulink в физический сигнал
Simscape / Утилиты
Блок Simulink-PS Converter преобразует вход Simulink® сигнал в физический сигнал. Используйте этот блок, чтобы соединить источники Simulink или другие блоки Simulink к входным параметрам физической сети Simscape™.
Чтобы передать преобразование сигнала при занимании минимального места холста, значок блока изменяется динамически на основе того, соединяется ли это с другими блоками.
| Когда блок... | Блокируйте значок |
|---|---|
Несвязанный |
|
Соединенный с другими блоками |
|
Значок блока также изменяется на основе значения параметра Input filtering order, чтобы указать, применяется ли фильтрация к входному сигналу.
| Введите порядок фильтрации | Несвязанный значок блока | Связанный значок блока |
|---|---|---|
|
|
|
|
|
|
Директор производства Simscape автоматически обрабатывает модульное распространение и проверяющий в физической сети и выполняет необходимые модульные операции преобразования.
Физический сигнал в выходном порту блока Simulink-PS Converter служит входным сигналом для физической сети Simscape, с которой соединяется блок. Модуль физического сигнала должен быть соразмерным с модулем, ожидаемым входным портом целевого блока, то есть, входной порт, соединенный с выходным портом блока Simulink-PS Converter.
Модули сигнала Simulink не распространяют в физические сети. Параметр Input signal unit позволяет вам задать физическую единицу измерения для значения входного сигнала, так, чтобы директор производства Simscape мог выполнить необходимые модульные преобразования и масштабировать выходной физический сигнал соответственно.
Примечание
Если вы также задаете физическую единицу измерения как атрибут Сигнала Simulink, соединенного с входным портом блока, программное обеспечение проверяет, что эти два модуля соответствуют. Для получения дополнительной информации смотрите Работу с Модулями Simulink.
Другими словами, параметр Input signal unit не определяет модули выходного физического сигнала, он только вводит масштабирующееся значение. Выходной модуль физического сигнала выведен из целевого блока. Целевые модули блока по умолчанию являются "килограммом метра, вторым" или MKS (SI). Если вы оставляете блок Simulink-PS Converter безразмерным с набором параметров Input signal unit к 1, затем блок не применяет масштабирование к входному сигналу. Если вы задаете различные модули, соразмерные с ожидаемыми модулями по умолчанию целевого входа блока, то директор производства присоединяет эти модули к входному значению Сигнала Simulink и выполняет необходимое модульное преобразование при обеспечении сигнала целевому блоку.
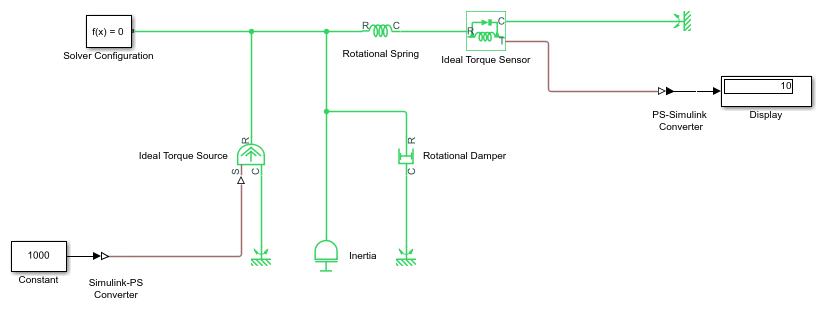
В схеме ниже, блок Ideal Torque Source ожидает сигнал крутящего момента, в N*m, на его порте S. Исходный блок Constant вводит значение для этого входного сигнала. Если бы вы оставили блок Simulink-PS Converter безразмерным, блок Ideal Torque Source сгенерировал бы крутящий момент 1 000 N*m. Параметры других блоков в этом примере выбраны так, чтобы выходное значение блока Ideal Torque Sensor было равно крутящему моменту, сгенерированному блоком Ideal Torque Source, и поэтому блок Display показал бы значение 1 000. Если вы изменяете значение параметров Input signal unit в блоке Simulink-PS Converter к N*cm, директор производства выполняет преобразование, и блок Ideal Torque Source генерирует крутящий момент 10 N*m; значение крутящего момента в блоке Display превращается на 10, как показано в схеме.
Когда входной сигнал связан с термодинамическими переменными и содержит единицы температуры, необходимо решить, должно ли аффинное преобразование быть применено. Для получения дополнительной информации смотрите, Когда Применить Аффинное Преобразование. Обычно, если входной сигнал представляет относительную температуру, то есть, изменение в температуре, необходимо применить линейное преобразование, ΔTnew = L * ΔTold (метод по умолчанию). Однако, если входной сигнал представляет абсолютную температуру, необходимо применить аффинное преобразование, Tnew = L * Told + O.
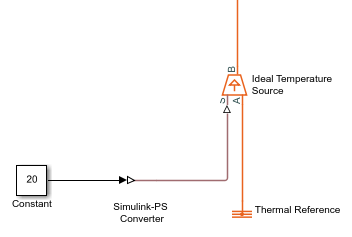
Например, в блоке Simulink-PS Converter, показанном в следующей схеме, если вы вводите degC в поле Input signal unit и устанавливают флажок Apply affine conversion, температура, сгенерированная блоком Ideal Temperature Source, равна 293.15 K. Однако, если вы оставляете флажок Apply affine conversion ясным, выход блока Ideal Temperature Source является 20 K.
Примечание
Невведенные входные параметры не поддерживают аффинные модули. Если вы задаете аффинные модули в блоке Simulink-PS Converter и затем соединяете его непосредственно с невведенным входным портом, значение сигналов преобразовано в соответствующую основную единицу, и дальнейшие математические операции выполняются с тем значением.
При симуляции модели вы, возможно, должны обеспечить производные времени некоторых входных сигналов, особенно если вы используете явный решатель. Один способ обеспечить необходимые входные производные путем пропущения входа через фильтр lowpass. Введите фильтрацию, делает входной сигнал более сглаженным и обычно улучшает производительность модели. Дополнительная выгода - то, что механизм Simscape вычисляет производные времени отфильтрованного входа. Фильтр первого порядка обеспечивает одну производную, в то время как фильтр второго порядка обеспечивает первые и вторые производные. Если вы используете входную фильтрацию, очень важно выбрать соответствующее значение для постоянной времени фильтра.
Постоянная времени фильтра управляет фильтрацией входного сигнала. Отфильтрованный вход следует за истинным входом, но сглаживается с задержкой порядка постоянной времени, которую вы выбираете. Установите постоянную времени на значение, не больше, чем самый маленький временной интервал в системе, которая интересует вас. Если вы выбираете очень небольшую постоянную времени, отфильтрованный входной сигнал ближе к истинному входному сигналу. Однако этот отфильтрованный входной сигнал увеличивает жесткость системы и замедляет симуляцию.
Вместо того, чтобы использовать входную фильтрацию, можно обеспечить производные времени для входного сигнала непосредственно как дополнительные Сигналы Simulink. Если обеспеченные производные противоречивы с входным сигналом, то некоторые количества могут быть неправильными в процессе моделирования.
Для кусочно-постоянных сигналов можно также явным образом обнулить входные производные. Используйте эту опцию для сигналов, которые являются действительно кусочно-постоянными, такими как шаг. Если вам произвели непрерывный входной сигнал с дискретным шагом расчета, обнуление входных производных может произвести неправильные результаты симуляции. Используйте одну из других двух опций: или отфильтруйте вход или обеспечьте производные времени как отдельные сигналы.


