ПИ-контроллер дискретного времени с внешним антизавершением вводится
Simscape / Электрический / Управление / Общее Управление
Блок Discrete PI Controller реализует дискретное управление PI с внешним антизаключительным входом.
Эта схема является эквивалентной схемой для контроллера с внешним антизаключительным входом.
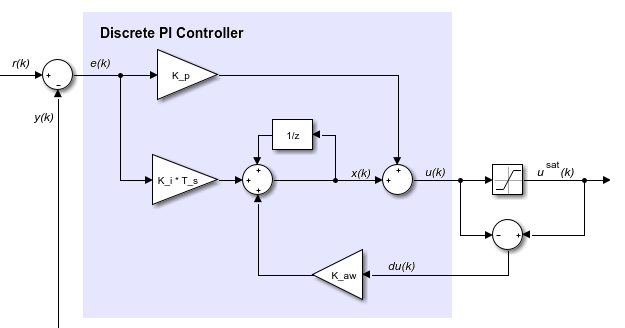
Блок Discrete PI Controller вычисляет управляющий сигнал с помощью обратного Эйлерового метода дискретизации:
где
u является управляющим сигналом.
Kp является коэффициентом пропорциональной составляющей.
Ki является коэффициентом интегральной составляющей.
Kaw является антизаключительным коэффициентом усиления.
Ts является периодом выборки.
e является сигналом ошибки.
Чтобы предотвратить чрезмерное перерегулирование, блок может использовать назад вычисление, чтобы реализовать внешний антизаключительный механизм. Это вводит du(k), различие между влажным управляющим сигналом, usat(k), и расчетный ненасыщенный управляющий сигнал, u(k). Это затем умножает различие на антизаключительный коэффициент и добавляет усиленный сигнал из интегральной составляющей.
[1] Åström, K. и Т. Хэггланд. Усовершенствованное управление ПИДом. Ресерч-Трайэнгел-Парк, NC: ISA, 2005.



