Контроллер дискретного времени обратной связи состояния с интегральным действием
Simscape / Электрический / Управление / Общее Управление
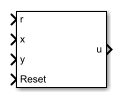
Блок State-Feedback Controller реализует контроллер дискретного времени обратной связи состояния с интегральным действием. Используйте этот блок, чтобы управлять линейными системами с синглом или несколькими входными параметрами и один или несколькими выходными параметрами. Интегральное действие служит, чтобы устранить установившуюся ошибку в управляемых выходных параметрах. Можно задать контроллер, использующий предварительно вычисленное оптимальное усиление, или использовать модель в пространстве состояний системы, чтобы сгенерировать это усиление с помощью размещения полюса.
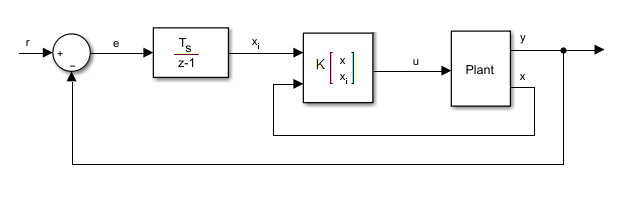
Интеграл ошибки отслеживания, xi, является дополнительным состоянием, которое гарантирует нулевую установившуюся ошибку для системы с обратной связью. Расширенный вектор состояния
Где:
x является вектором состояния.
xi является интегралом ошибки отслеживания.
xe является расширенным вектором состояния.
Поэтому действие управления
Где:
K является матрицей обратной связи, то есть, размещением полюса.
u является контроллером выход.
Системное измерение состояния и оценка происходят вне контроллера.


