Simulink® PLC Coder™ встраивает MATLAB® функции в сгенерированном коде на основе ваших технических требований встраивания. Чтобы задать, встроить ли функцию:
Щелкните правой кнопкой по функции MATLAB и выберите Properties.
Для Function Inline Option выберите Inline если вы хотите, чтобы функция была встроена. Выберите Function если вы не хотите, чтобы функция была встроена. Для получения дополнительной информации смотрите Specify Properties функций MATLAB (Stateflow).
Однако Simulink PLC Coder не следует вашим техническим требованиям встраивания точно в следующих случаях:
Если данные о доступах к функции MATLAB, которые локальны для графика, он встраивается в сгенерированном коде, даже если вы указываете, что функция не должна быть встроена.
Объяснение: график преобразован в функциональный блок в сгенерированном коде. Если функция MATLAB в графике преобразована в функцию Структурированного текста, это не может получить доступ к данным экземпляра функционального блока. Поэтому функция MATLAB не может быть преобразована в функцию Структурированного текста в сгенерированном коде и встраивается.
Если функция MATLAB имеет несколько выходных параметров, и вы указываете, что функция не должна быть встроена, это преобразовано в функциональный блок в сгенерированном коде.
Объяснение: функция Структурированного текста не может иметь нескольких выходных параметров, поэтому функция MATLAB не может быть преобразована в функцию Структурированного текста.
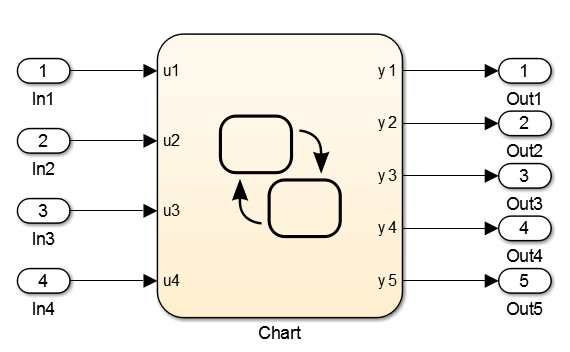
Следующий простой пример иллюстрирует различные случаи. Модель, используемая здесь, имеет Stateflow® стройте диаграмму, который содержит четыре функции MATLAB fcn1 к fcn4.
Вот модель.
Вот диаграмма Stateflow.
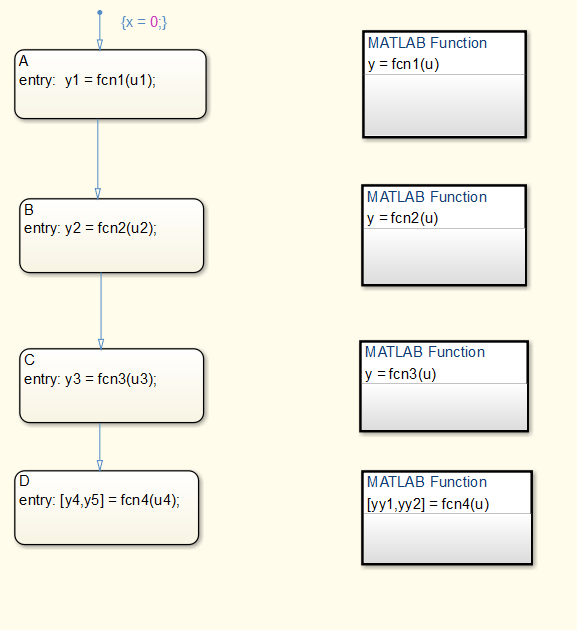
Функции fcn1 к fcn4 определяются следующим образом.
| Функция | Встраивание спецификации | Сгенерированный код |
|---|---|---|
|
function y = fcn1(u) y = u+1; | Укажите, что функция должна быть встроена. |
is_c3_Chart := Chart_IN_A; (* Outport: '<Root>/y1' incorporates: * Inport: '<Root>/u1' *) (* Entry 'A': '<S1>:10' *) (* MATLAB Function 'fcn1': '<S1>:1' *) (* '<S1>:1:3' *) y1 := u1 + 1.0; |
|
function y = fcn2(u) y = u+2; | Укажите, что функция не должна быть встроена. |
is_c3_Chart := Chart_IN_B;
(* Outport: '<Root>/y2' incorporates:
* Inport: '<Root>/u2' *)
(* Entry 'B': '<S1>:11' *)
y2 := fcn2(u := u2);
.
.
.
FUNCTION fcn2: LREAL
VAR_INPUT
u: LREAL;
END_VAR
VAR_TEMP
END_VAR
(* MATLAB Function 'fcn2': '<S1>:4' *)
(* '<S1>:4:3' *)
fcn2 := u + 2.0;
END_FUNCTION |
|
function y = fcn3(u) % The function accesses % local data x of parent chart y = u+3+x; | Укажите, что функция не должна быть встроена. |
is_c3_Chart := Chart_IN_C; (* Outport: '<Root>/y3' incorporates: * Inport: '<Root>/u3' *) (* Entry 'C': '<S1>:15' *) (* MATLAB Function 'fcn3': '<S1>:9' *) (* The function accesses local data x of parent chart *) (* '<S1>:9:4' *) y3 := (u3 + 3.0) + x; |
|
function [yy1,yy2] = fcn4(u) yy1 = u+4; yy2 = u+5; | Укажите, что функция не должна быть встроена. |
is_c3_Chart := Chart_IN_D;
(* Entry 'D': '<S1>:28' *)
i0_fcn4(u := u4);
b_y4 := i0_fcn4.yy1;
b_y5 := i0_fcn4.yy2;
(* Outport: '<Root>/y4' incorporates:
* Inport: '<Root>/u4' *)
y4 := b_y4;
(* Outport: '<Root>/y5' *)
y5 := b_y5;
.
.
.
FUNCTION_BLOCK fcn4
VAR_INPUT
u: LREAL;
END_VAR
VAR_OUTPUT
yy1: LREAL;
yy2: LREAL;
END_VAR
VAR
END_VAR
VAR_TEMP
END_VAR
(* MATLAB Function 'fcn4': '<S1>:26' *)
(* '<S1>:26:3' *)
yy1 := u + 4.0;
(* '<S1>:26:4' *)
yy2 := u + 5.0;
END_FUNCTION_BLOCK |
