Если вы знаете аппроксимированное время, когда модель достигает окружения установившейся рабочей точки, можно использовать симуляцию, чтобы заставить значения состояния использовать в качестве начальных условий для числовой оптимизации.
Можно инициализировать поисковые запросы рабочей точки снимком состояния симуляции при вычислении рабочих точек с помощью Steady State Manager.
Откройте Simulink® модель.
sys = 'watertank';
open_system(sys)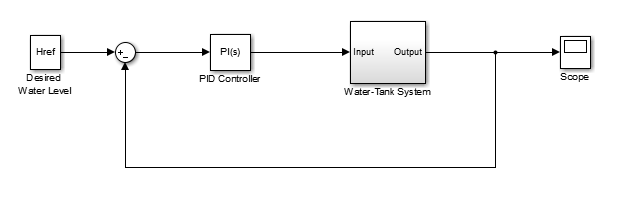
Чтобы открыть Steady State Manager, в окне модели Simulink, в галерее Apps, нажимают Steady State Manager.
В Steady State Manager, на вкладке Steady State, нажимают Snapshots.
В диалоговом окне Create Snapshot Operating Point введите 10 в поле Simulation snapshot times, чтобы извлечь рабочую точку в этом времени симуляции.
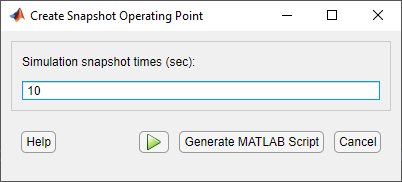
Чтобы взять снимок состояния системы в требуемое время, щелкнуть![]() .
.
Снимок состояния, op1, появляется в Data Browser, в разделе Operating Points и содержит все системные значения состояния в требуемое время.
На вкладке Steady State нажмите Trim Specification.
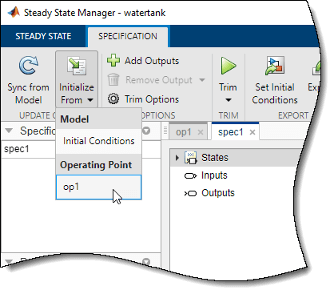
Чтобы Инициализировать состояния рабочей точки значениями снимка состояния симуляции, на вкладке Specification, нажимают Initialize From
![]() и выбирают
и выбирают op1.
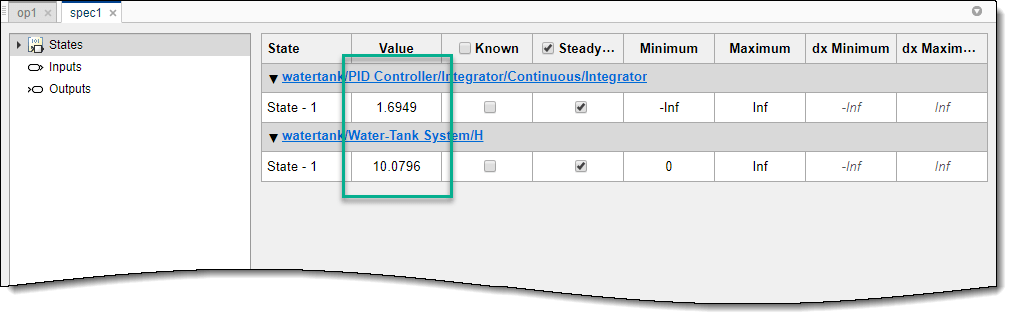
В документе spec1 отображенные значения состояния обновляются, чтобы отразить импортированные значения.
Найти оптимизированную рабочую точку с помощью состояний в t = 10 когда начальные значения, на вкладке Specification, нажимают Trim
![]() . Программное обеспечение обрезает модель и генерирует отчет поиска рабочей точки.
. Программное обеспечение обрезает модель и генерирует отчет поиска рабочей точки.
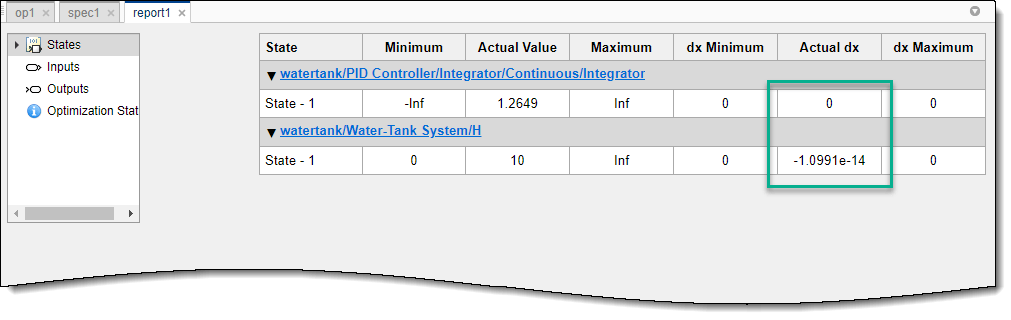
В документе report1 значения Actual dx в или около нуля, показывая, что рабочая точка в устойчивом состоянии.
Можно инициализировать поисковые запросы рабочей точки снимком состояния симуляции при вычислении рабочих точек с помощью Model Linearizer.
Откройте модель Simulink.
sys = ('watertank');
open_system(sys)
В окне модели Simulink, в галерее Apps, нажимают Model Linearizer.
В Model Linearizer, в Operating Point выпадающий список, нажимают Take Simulation Snapshot.
Во Ввести времена снимка состояния, чтобы линеаризовать диалоговое окно, введите 10 в поле Simulation snapshot times, чтобы извлечь рабочую точку в этом времени симуляции.
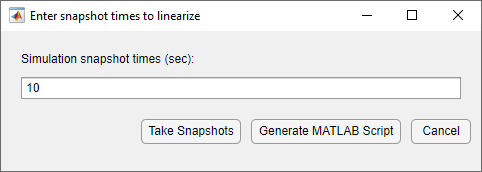
Чтобы взять снимок состояния системы в требуемое время, нажмите Take Snapshots.
Снимок состояния, op_snapshot1, появляется в Data Browser, в разделе Linear Analysis Workspace и содержит все системные значения состояния в требуемое время.
На вкладке Linear Analysis, в Operating Point выпадающий список, нажимают Trim Model.
Чтобы Инициализировать состояния рабочей точки значениями снимка состояния симуляции, в Обрезке диалоговое окно модели, нажимают Import.
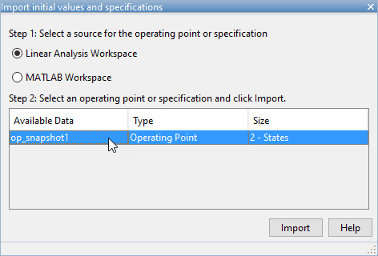
В диалоговом окне начальных значений и технических требований Импорта выберите op_snapshot1, и нажмите Import.
В Обрезке диалоговое окно модели отображенные значения состояния обновляются, чтобы отразить импортированные значения.
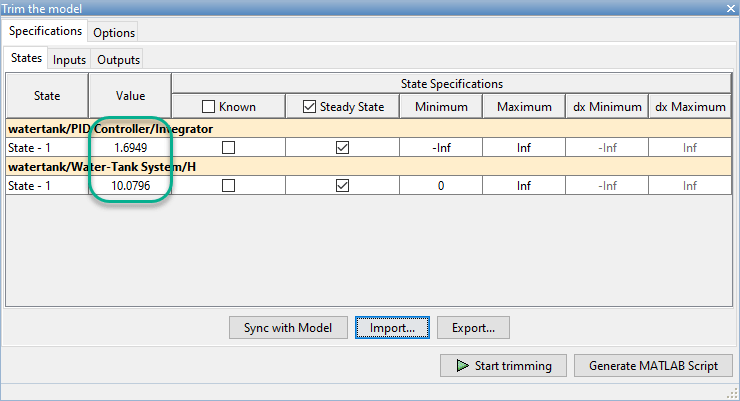
Найти оптимизированную рабочую точку с помощью состояний в t = 10 как начальные значения, нажмите Start trimming.
Чтобы оценить, выполняют ли получившиеся значения рабочей точки техническим требованиям, в Data Browser, в разделе Linear Analysis Workspace, дважды кликают op_trim1.
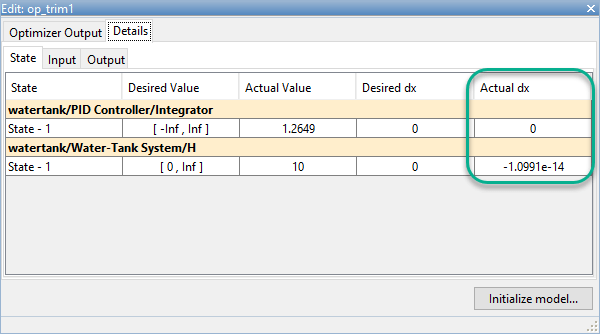
Значения Actual dx в или около нуля, показывая, что рабочая точка в устойчивом состоянии.
Можно инициализировать поисковые запросы рабочей точки снимком состояния симуляции при вычислении рабочих точек с помощью findop функция.
Откройте модель Simulink.
sys = 'watertank';
load_system(sys)Симулируйте модель, пока она не достигает устойчивого состояния, и извлеките снимок состояния рабочей точки. В данном примере используйте десять единиц измерения времени.
opsim = findop(sys,10);
Создайте объект спецификации рабочей точки. По умолчанию все состояния модели заданы, чтобы быть в устойчивом состоянии.
opspec = operspec(sys);
Сконфигурируйте начальные значения для поиска рабочей точки использование данных о снимке состояния.
opspec = initopspec(opspec,opsim);
Найдите установившуюся рабочую точку, которая выполняет этим техническим требованиям.
[op,opreport] = findop(sys,opspec);
Operating point search report: ---------------------------------
opreport =
Operating point search report for the Model watertank.
(Time-Varying Components Evaluated at time t=10)
Operating point specifications were successfully met.
States:
----------
Min x Max dxMin dx dxMax
____ ______ ___ _____ ___________ _____
(1.) watertank/PID Controller/Integrator/Continuous/Integrator
-Inf 1.2649 Inf 0 0 0
(2.) watertank/Water-Tank System/H
0 10 Inf 0 -1.0991e-14 0
Inputs: None
----------
Outputs: None
----------
Производная времени каждого состояния, dx, является эффективно нулевым. Это значение производной состояния указывает, что рабочая точка в устойчивом состоянии.
