Во многих ситуациях динамическое представление системы, которой вы хотите управлять, не легко доступно. Одно решение этой проблемы состоит в том, чтобы получить динамическую модель с помощью идентификационных методов. Система взволнована измеримым сигналом, и соответствующий ответ системы собран на уровне некоторой частоты дискретизации. Получившиеся данные ввода - вывода затем используются, чтобы получить модель системы, такой как передаточная функция или модель в пространстве состояний. Этот процесс называется system identification или estimation. Цель системы идентификации состоит в том, чтобы выбрать модель, которая дает к самой лучшей подгонке между измеренным откликом системы к конкретному входу и ответом модели на тот же вход.
Если у вас есть Simulink® модель вашей системы управления, можно симулировать данные о вводе/выводе вместо того, чтобы измерить его. Процесс оценки является тем же самым. Отклик системы к некоторому известному возбуждению симулирован, и динамическая модель оценивается основанная на получившихся симулированных данных о вводе/выводе.
Используете ли вы измеренные или симулированные данные для оценки, когда-то подходящая модель объекта управления идентифицирована, вы налагаете цели управления на объект на основе вашего знания желаемого поведения системы, что модель объекта управления представляет. Вы затем проектируете контроллер обратной связи, чтобы достигнуть тех целей.
Если у вас есть программное обеспечение System Identification Toolbox™, можно использовать PID Tuner и для идентификации объекта и для проектирования контроллера в одном интерфейсе. Можно импортировать данные о вводе/выводе и использовать их, чтобы идентифицировать одну или несколько моделей объекта управления. Или, можно получить симулированные данные о вводе/выводе из модели Simulink и использования что идентифицировать одну или несколько моделей объекта управления. Можно затем спроектировать и проверить ПИД-регуляторы с помощью этих объектов. PID Tuner также позволяет вам непосредственно импортировать модели объекта управления, такой как один вы получили из независимой идентификационной задачи.
Для обзора системы идентификации займитесь System Identification (System Identification Toolbox).
Динамическое поведение многих систем может быть описано соответственно линейным соотношением между вводом и выводом системы. Даже когда поведение становится нелинейным в некоторых операционных режимах, часто существуют режимы, в которых системные движущие силы линейны. Например, поведение операционного усилителя или динамика лифта по сравнению с силой аэродинамических тел могут быть описаны линейными моделями в определенном ограниченном рабочем диапазоне входных параметров. Для такой системы можно выполнить эксперимент (или симуляция), который волнует систему только в ее линейной области значений поведения, и соберите данные о вводе/выводе. Можно затем использовать данные, чтобы оценить линейную модель объекта управления и спроектировать ПИД-регулятор для линейной модели.
В других случаях малы эффекты нелинейности. В таком случае линейная модель может обеспечить хорошее приближение, такое, что нелинейные отклонения обработаны как воздействия. Такие приближения зависят в большой степени от входного профиля, амплитуды и содержимого частоты сигнала возбуждения.
Линейные модели часто описывают отклонение ответа системы от некоторой точки равновесия, из-за маленьких входных параметров беспокойства. Рассмотрите нелинейную систему, выход которой, y (t), следует за предписанной траекторией в ответ на известный вход, u (t). Движущие силы описаны dx (t)/dt = f (x, u), y = g (x, u). Здесь, x является вектором из внутренних состояний системы, и y является вектором из выходных переменных. Функции f и g, который может быть нелинейным, являются математическими описаниями динамики измерения и системы. Предположим, что, когда система в условии равновесия, небольшое возмущение к входу, Δu, приводит к небольшому возмущению в выходе, Δy:
Например, рассмотрите систему следующей Диаграммы Simulink:
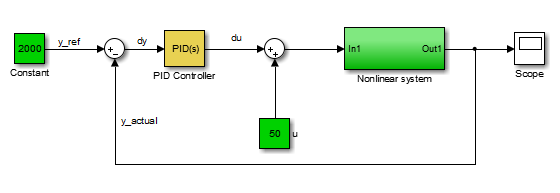
При работе в среде без воздействия номинальный вход значения 50 сохраняет объект вдоль своей постоянной траектории значения 2000. Любые воздействия заставили бы объект отклоняться от этого значения. Задача ПИД-регулятора состоит в том, чтобы добавить маленькую коррекцию во входной сигнал, который возвращает систему ее номинальной стоимости за разумное количество времени. ПИД-регулятор таким образом должен работать только над линейной динамикой отклонения даже при том, что сам фактический объект может быть нелинейным. Таким образом вы можете смочь достигнуть эффективного управления нелинейной системой в некоторых режимах путем разработки ПИД-регулятора для линейной аппроксимации системы в условиях равновесия.
Случай общего использования проектирует ПИД-регуляторы для установившейся операции заводов-изготовителей. На этих объектах модель, связывающая эффект измеримой входной переменной на выходном количестве, часто требуется в форме объекта SISO. Полной системой может быть MIMO по своей природе, но экспериментирование или симуляция выполняются способом, который позволяет измерить инкрементный эффект одной входной переменной на выбранном выходе. Данные могут быть довольно шумными, но поскольку ожидание состоит в том, чтобы управлять только доминирующей динамикой, модель объекта управления младшего разряда часто достаточна. Такой прокси получен путем сбора или симуляции данных ввода - вывода и получения модели процесса (передаточная функция низкоуровневая с неизвестной задержкой) от него. Сигнал возбуждения для получения данных может часто быть простым ударом в значении выбранной входной переменной.
В PID Tuner можно только идентифицировать одно вход, один выход, модели объекта управления непрерывного времени. Кроме того, PID Tuner не может выполнить следующие задачи системы идентификации:
Идентифицируйте передаточные функции произвольного числа полюсов и нулей. (PID Tuner может идентифицировать передаточные функции до трех полюсов и один нуль плюс интегратор и задержка. PID Tuner может идентифицировать модели в пространстве состояний произвольного порядка.)
Оцените компонент воздействия модели, которая может быть полезна для разделения измеренной динамики от шумовой динамики.
Подтвердите оценку путем сравнения ответа объекта с независимым набором данных.
Выполните остаточный анализ.
Если вы нуждаетесь в этих расширенных идентификационных функциях, импортируете ваши данные в приложение System Identification (System Identification (System Identification Toolbox)). Используйте приложение System Identification, чтобы выполнить идентификацию модели и экспортировать идентифицированную модель в MATLAB® рабочая область. Затем импортируйте идентифицированную модель в PID Tuner для проекта ПИД-регулятора.
Для получения дополнительной информации об Инструменте System Identification, смотрите, Идентифицируют Линейные Модели Используя Приложение System Identification (System Identification Toolbox).
System Identification (System Identification Toolbox)
