В PID Tuner вы настраиваете компенсатор с помощью линейной модели объекта. Во-первых, вы находите хороший проект компенсатора в PID Tuner. Затем проверьте, что настроенный контроллер соответствует вашим конструктивным требованиям, когда применено нелинейный объект в вашем Simulink® модель.
Чтобы проверить компенсатор проектируют в нелинейной модели Simulink:
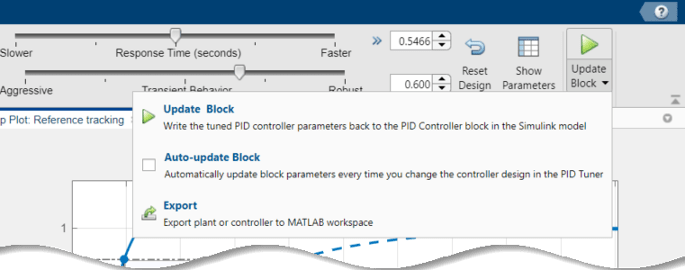
Во вкладке PID Tuner щелкните![]() , чтобы обновить блок ПИД-регулятора Simulink настроенными параметрами ПИДа.
, чтобы обновить блок ПИД-регулятора Simulink настроенными параметрами ПИДа.
Совет
Чтобы обновить параметры блоков ПИДа автоматически, когда вы настраиваете контроллер в PID Tuner, нажмите Update Block и проверяйте Auto-update block.
Симулируйте модель Simulink и оцените, соответствует ли симуляция выход вашим конструктивным требованиям.
Поскольку PID Tuner работает с линейной моделью вашего объекта, симулированный отклик иногда не совпадает с ответом в PID Tuner. Смотрите, что Симулированный отклик Не Совпадает с Ответом PID Tuner для получения дополнительной информации.
Если симулированный отклик не соответствует вашим конструктивным требованиям, смотрите, не Может Найти Приемлемый Проект ПИДа в Симулированной Модели.
