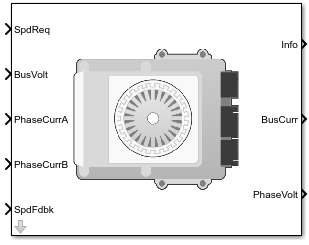
Контроллер IM
Внутренний основанный на крутящем моменте, ориентированный на поле контроллер для асинхронного двигателя с дополнительным контроллером скорости внешнего цикла
Описание
Блок IM Controller реализует внутренний основанный на крутящем моменте, ориентированный на поле контроллер для асинхронного двигателя (IM) с дополнительным контроллером скорости внешнего цикла. Управление крутящим моментом реализует стратегию управлять моторным потоком. Можно задать или скорость или закрутить управление.
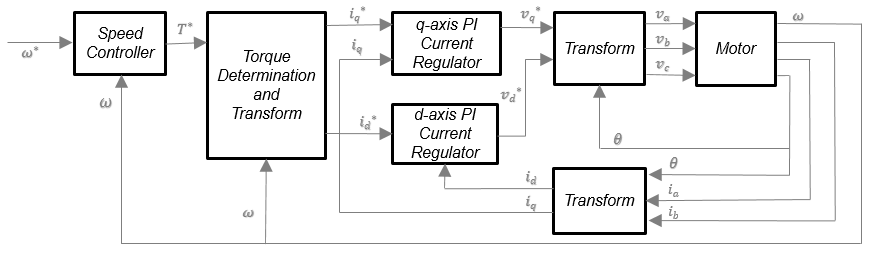
Контроллер IM реализует уравнения для регулировки скорости, определения крутящего момента, регуляторов, преобразовывает, и двигатели.
Фигура иллюстрирует информационный поток в блоке.
Блок реализует уравнения, которые используют эти переменные.
| ω | Скорость ротора |
| ω* | Команда скорости ротора |
| T* | Закрутите команду |
id i*d | текущая d-ось d-ось текущая команда |
iq i*q | текущая q-ось q-ось текущая команда |
vd, v*d | напряжение d-оси команда напряжения d-оси |
vq v*q | напряжение q-оси команда напряжения q-оси |
| va, vb, vc | Фаза a Stator, b, c напряжения |
| ia, ib, ic | Фаза a Stator, b, c токи |
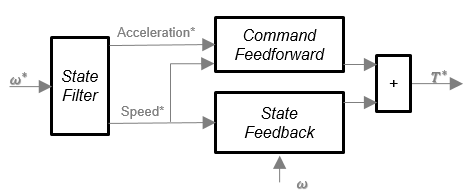
Контроллер скорости
Чтобы реализовать контроллер скорости, выберите параметр Control Type Speed Control. Если вы выбираете параметр Control Type Torque Control, блок не реализует контроллер скорости.
Контроллер скорости определяет команду крутящего момента путем реализации фильтра состояния и вычисления команд обратной связи и feedforward. Если вы не реализуете контроллер скорости, введите команду крутящего момента к блоку IM Controller.
Фильтр состояния
Фильтр состояния является фильтром нижних частот, который генерирует ускоряющую команду на основе команды скорости. На вкладке Speed Controller:
Чтобы сделать время задержки команды скорости незначительным, задайте параметр Bandwidth of the state filter.
Чтобы вычислить усиление Speed time constant, Ksf на основе пропускной способности фильтра состояния, выберите Calculate Speed Regulator Gains.
Дискретной формой характеристического уравнения дают:
Фильтр вычисляет усиление с помощью этого уравнения.
Уравнение использует эти переменные.
| EVsf | Пропускная способность фильтра команды скорости |
| Tsm | Контроллер движения шаг расчета |
| Ksf | Временная константа регулятора скорости |
Обратная связь состояния
Чтобы сгенерировать крутящий момент обратной связи состояния, блок использует отфильтрованный сигнал скоростной погрешности от фильтра состояния. Вычисление крутящего момента обратной связи также требует усилений для регулятора скорости.
На вкладке Speed Controller выберите Calculate Speed Regulator Gains, чтобы вычислить:
Proportional gain, ba
Angular gain, Ksa
Rotational gain, Kisa
Для вычислений усиления блок использует инерцию от значения параметров Physical inertia, viscous damping, static friction на вкладке the Motor Parameter.
Усиления для обратной связи состояния вычисляются с помощью этих уравнений.
| Вычисление | Уравнения |
|---|
| Дискретные формы характеристического уравнения |
|
Регулятор скорости пропорциональное усиление | |
Усиление интеграла регулятора скорости | |
Усиление двойного интеграла регулятора скорости | |
Уравнения используют эти переменные.
| P | Моторные пары полюса |
| ba | Регулятор скорости пропорциональное усиление |
| Ksa | Усиление интеграла регулятора скорости |
| Kisa | Усиление двойного интеграла регулятора скорости |
| Jp | Моторная инерция |
| Tsm | Контроллер движения шаг расчета |
Команда Feedforward
Чтобы сгенерировать состояние feedforward крутящий момент, блок использует отфильтрованную скорость и ускорение от фильтра состояния. Кроме того, вычисление крутящего момента feedforward использует инерцию, вязкое затухание и статическое трение. Чтобы достигнуть нулевой ошибки отслеживания, команда крутящего момента является суммой feedforward и команд крутящего момента обратной связи.
Выбор Calculate Speed Regulator Gains на вкладке Speed Controller обновляет инерцию, вязкое затухание и статическое трение со значениями параметров Physical inertia, viscous damping, static friction на вкладке the Motor Parameter.
Команда крутящего момента feedforward использует это уравнение.
Уравнение использует эти переменные.
| Jp | Моторная инерция |
| Tcmd_ff | Закрутите команду feedforward |
| Fs | Статический постоянный крутящий момент трения |
| Fv | Вязкий постоянный крутящий момент трения |
| Fs | Статический постоянный крутящий момент трения |
| ωm | Скорость механического устройства ротора |
Закрутите определение
Блок использует квадратуру, текущую, чтобы определить основную скорость и текущие команды. Моторные оценки определяют расчетную электрическую скорость.
| Вычисление | Уравнения |
|---|
| Текущие команды |
If
Еще
Конец |
| Индуктивность | |
Уравнения используют эти переменные.
| idref | текущая ссылка d-оси |
| iqref | текущая ссылка q-оси |
| isd_0 | номинальный ток d-оси |
| isq_0 | номинальный ток q-оси |
| ωe | Ротор электрическая скорость |
| ωrated | Расчетная электрическая скорость |
| Llr | Индуктивность утечки ротора |
| Lr | Ротор извилистая индуктивность |
| Lls | Индуктивность утечки статора |
| Ls | Статор извилистая индуктивность |
| Lm | Моторная индуктивность намагничивания |
| P | Моторные пары полюса |
| Tcmd | Моторный максимальный крутящий момент, которым управляют, |
Текущие регуляторы
Блок регулирует ток с антизаключительной функцией. Классический пропорциональный интегратор (PI) текущие регуляторы не рассматривает d-ось и связь q-оси или электромагнитную спиной силу (EMF) связь. В результате переходная производительность ухудшается. Чтобы составлять связь, блок реализует комплексный вектор текущий регулятор (CVCR) в скалярном формате кадра ссылки ротора. CVCR разъединяется:
Ответ частоты тока является системой первого порядка с пропускной способностью EVcurrent.
Блок реализует эти уравнения.
| Вычисление | Уравнения |
|---|
| Моторное напряжение, в кадре ссылки статора | |
| Текущие усиления регулятора | |
| Передаточные функции | |
Уравнения используют эти переменные.
| EVcurrent | Текущая пропускная способность регулятора |
| id | текущая d-ось |
| iq | текущая q-ось |
| isq | Текущая q-ось статора |
| isd | Текущая d-ось статора |
| vsd | Напряжение d-оси статора |
| vsq | Напряжение q-оси статора |
| Kp | Текущее усиление d-оси регулятора |
| Ki | Текущее усиление интегратора регулятора |
| Ls | Статор извилистая индуктивность |
| Lm | Моторная индуктивность намагничивания |
| Lr | Ротор извилистая индуктивность |
| Rs | Сопротивление обмотки фазы Stator |
| λrd | Магнитный поток d-оси ротора |
| σ | Фактор утечки |
| p | Моторные пары полюса |
Преобразовывает
Чтобы вычислить напряжения и токи в трехфазном сбалансированном (a, b) количества, двухфазная квадратура (α, β) количества, и вращающийся (d, q) ссылочные кадры, блок использует Преобразования Кларка и Парка.
В уравнениях преобразования.
| Преобразовать | Описание | Уравнения |
|---|
Кларк | Преобразовывает сбалансированные трехфазные количества (a, b) в сбалансированные двухфазные квадратурные количества (α, β). | |
Парк | Преобразовывает сбалансированные двухфазные ортогональные стационарные количества (α, β) в ортогональный кадр ссылки вращения (d, q). | |
Инверсия Кларк | Преобразовывает сбалансированные двухфазные квадратурные количества (α, β) в сбалансированные трехфазные количества (a, b). | |
Обратный парк | Преобразовывает ортогональный кадр ссылки вращения (d, q) в сбалансированные двухфазные ортогональные стационарные количества (α, β). | |
Преобразования используют эти переменные.
| ωm | Скорость механического устройства ротора |
| P | Моторные пары полюса |
| ωe | Ротор электрическая скорость |
| Θe | Ротор электрический угол |
| x | Ток фазы или напряжение |
Двигатель
Блок использует токи фазы и напряжения фазы, чтобы оценить текущую шину DC. Положительный ток указывает на выброс батареи. Отрицательный ток указывает на заряд батареи. Блок использует эти уравнения.
|
Загрузите степень
| |
|
Исходная степень
| |
|
Текущая шина DC
| |
|
Предполагаемый крутящий момент ротора
| |
|
Потери мощности для одного источника эффективности, чтобы загрузить
| |
|
Потери мощности для одной эффективности загружают к источнику
| |
|
Потери мощности для сведенной в таблицу эффективности
| |
Уравнения используют эти переменные.
| va, vb, vc |
Фаза a Stator, b, c напряжения
|
| vbus |
Предполагаемое напряжение на шине DC
|
| ia, ib, ic |
Фаза a Stator, b, c токи
|
| ibus |
Предполагаемая текущая шина DC
|
| Eff |
Полная эффективность инвертора
|
| ωm |
Скорость механического устройства ротора
|
| Lr |
Ротор извилистая индуктивность
|
| Lm |
Моторная индуктивность намагничивания
|
| λrd |
Магнитный поток d-оси ротора
|
| isq |
текущая q-ось
|
| P |
Моторные пары полюса
|
Электрические потери
Задавать электрические потери, на вкладке Electrical Losses, для Parameterize losses by, избранной одной из этих опций.
| Установка | Блокируйте реализацию |
|---|
Single efficiency measurement | Электрическая потеря вычислила использование постоянного значения для эффективности инвертора. |
Tabulated loss data | Электрическая потеря, вычисленная как функция частот вращения двигателя и крутящих моментов загрузки. |
Tabulated efficiency data | Электрическая потеря вычислила с помощью эффективности инвертора, которая является функцией крутящих моментов загрузки и частот вращения двигателя.
Преобразовывает значения эффективности, которые вы обеспечиваете в потери, и использует сведенные в таблицу потери для симуляции. Игнорирует значения эффективности, вы предусматриваете нулевую скорость или обнуляете крутящий момент. Потери приняты нуль, когда или крутящий момент или скорость являются нулем. Линейная интерполяция использования, чтобы определить потери. Обеспечьте сведенные в таблицу данные для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени. Не экстраполирует значения потерь для скорости и закручивает значения, которые превышают область значений таблицы.
|
Для лучшой практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность заболевает заданная для нулевой скорости или нулевого крутящего момента.
Можно объяснить постоянные составляющие потерь, которые все еще присутствуют для нулевой скорости или крутящего момента.
Порты
Входной параметр
развернуть все
SpdReq — Команда скорости механического устройства ротора
scalar
Команда скорости механического устройства ротора, ω*m, в rad/s.
Зависимости
Чтобы создать этот порт, выберите Speed Control для параметра Control Type.
TrqCmd — Закрутите команду
scalar
Закрутите команду, T*, в N · m.
Зависимости
Чтобы создать этот порт, выберите Torque Control для параметра Control Type.
BusVolt — Напряжение на шине DC
scalar
Напряжение на шине DC vbus, в V.
PhaseCurrA — Текущий
scalar
Статор текущая фаза a, ia, в A.
PhaseCurrB — Текущий
scalar
Статор текущая фаза b, ib, в A.
SpdFdbk — Скорость механического устройства ротора
scalar
Скорость механического устройства ротора, ωm, в rad/s.
Вывод
развернуть все
Информация Сигнал шины
шина
Сигнал шины, содержащий эти вычисления блока.
| Сигнал | Описание | Модули |
|---|
|
SrcPwr
|
Исходная степень
|
W
|
|
LdPwr
|
Загрузите степень
|
W
|
|
PwrLoss
|
Потери мощности
|
W
|
|
MtrTrqEst
|
Предполагаемый моторный крутящий момент
|
N·
|
BusCurr — Текущая шина
scalar
Предполагаемая текущая шина DC, ibus, в A.
PhaseVolt — Напряжения терминала статора
array
Напряжения терминала статора, Va, Vb и Vc, в V.
Параметры
развернуть все
Блокируйте опции
Control Type — Выберите управление
Speed Control (значение по умолчанию) | Torque Control
Если вы выбираете Torque Control, блок не реализует контроллер скорости.
Эта таблица суммирует конфигурации порта.
| Конфигурация порта | Создает порты |
|---|
Speed Control | SpdReq
|
Torque Control | TrqCmd
|
Двигатель
Stator resistance, Rs — Сопротивление
scalar
Сопротивление обмотки фазы Stator, Rs, в Оме.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Stator resistance, Rs | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
D and Q axis integral gain, Ki | Current Controller |
Stator leakage inductance, Lls — Индуктивность
scalar
Индуктивность утечки статора, Lls, в H.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Stator leakage inductance, Lls | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
D and Q axis proportional gain, Kp D and Q axis integral gain, Ki | Current Controller |
Rotor resistance, Rr — Сопротивление
scalar
Сопротивление ротора, Rr, в Оме.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rotor resistance, Rr | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
Rotor leakage inductance, Llr — Индуктивность
scalar
Индуктивность утечки ротора, Llr, в H.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rotor leakage inductance, Llr | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
D and Q axis proportional gain, Kp | Current Controller |
Rotor magnetizing inductance, Lm — Индуктивность
scalar
Индуктивность намагничивания ротора, Lm, в H.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rotor leakage inductance, Llr | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
D and Q axis proportional gain, Kp | Current Controller |
Number of pole pairs, PolePairs — Полюса
scalar
Моторные пары полюса, P.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rotor leakage inductance, Llr | Torque at rated current, Tem | Id and Iq Calculation |
Physical inertia, viscous damping, static friction, Mechanical — Механические свойства двигателя
vector
Механические свойства двигателя:
Моторная инерция, Fv, в kgm^2
Вязкий постоянный крутящий момент трения, Fv, в N · m / (rad/s)
Статический постоянный крутящий момент трения, Fs, в N · m
Зависимости
Чтобы включить этот параметр, установите параметр Control Type на Speed Control.
Для вычислений усиления блок использует инерцию от значения параметров Physical inertia, viscous damping, static friction, которое находится на вкладке Motor Parameters.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Physical inertia, viscous damping, static friction, Mechanical | Proportional gain, ba Angular gain, Ksa Rotational gain, Kisa Inertia compensation, Jcomp Viscous damping compensation, Fv Static friction, Fs | Speed Controller |
ID и вычисление IQ
Rated synchronous speed, Frate — Моторная частота
scalar
Оцененная двигателем электрическая частота, Frate, в Гц.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rated synchronous speed, Frate | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
Rated line to line voltage RMS, Vrate — Моторное напряжение
scalar
Оцененная двигателем строка к линейному напряжению, Vrate, в V.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rated synchronous speed, Frate | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
Rated slip, Srate — Моторная скорость промаха
scalar
Оцененная двигателем скорость промаха, Srate, безразмерный.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Rated slip, Srate | D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Id and Iq Calculation |
Calculate Rated Stator Flux Current — Выведите параметры
кнопка
Щелкните, чтобы вывести параметры.
Зависимости
На вкладке Id and Iq Calculation, когда вы выбираете Calculate Rated Stator Flux Current, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Id and Iq Calculation | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Rated synchronous speed, Frate Rated line to line voltage RMS, Vrate Rated slip, Srate | Id and Iq Calculation |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
D-axis rated current, Isd_0 — Выведенный
scalar
Выведенный номинальный ток d-оси, в A.
Зависимости
На вкладке Id and Iq Calculation, когда вы выбираете Calculate Rated Stator Flux Current, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Id and Iq Calculation | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Rated synchronous speed, Frate Rated line to line voltage RMS, Vrate Rated slip, Srate | Id and Iq Calculation |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
Q-axis rated current, Isq_0 — Выведенный
scalar
Выведенный номинальный ток q-оси, в A.
Зависимости
На вкладке Id and Iq Calculation, когда вы выбираете Calculate Rated Stator Flux Current, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Id and Iq Calculation | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Rated synchronous speed, Frate Rated line to line voltage RMS, Vrate Rated slip, Srate | Id and Iq Calculation |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
Torque at rated current, Tem — Выведенный
scalar
Закрутите в номинальном токе в N · m.
Зависимости
На вкладке Id and Iq Calculation, когда вы выбираете Calculate Rated Stator Flux Current, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Id and Iq Calculation | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D-axis rated current, Isd_0 Q-axis rated current, Isq_0 Torque at rated current, Tem | Rated synchronous speed, Frate Rated line to line voltage RMS, Vrate Rated slip, Srate | Id and Iq Calculation |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
Текущий контроллер
Bandwidth of the current regulator, EV_current — Пропускная способность
scalar
Текущая пропускная способность регулятора, в Гц.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Bandwidth of the current regulator, EV_current | D and Q axis integral gain, Ki D and Q axis proportional gain, Kp | Current Controller |
Sample time for the torque control, Tst — Время
scalar
Закрутите время контрольной выборки в s.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Sample time for the torque control, Tst | Speed time constant, Ksf | Speed Controller |
Calculate Current Regulator Gains — Выведите параметры
кнопка
Щелкните, чтобы вывести параметры.
Зависимости
На вкладке Current Controller, когда вы выбираете Calculate Current Regulator Gains, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Current Controller | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D and Q axis proportional gain, Kp D and Q axis integral gain, Ki | Bandwidth of the current regulator, EV_current | Current Controller |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
D and Q axis proportional gain, Kp — Выведенный
scalar
Выведенное пропорциональное усиление, в V/A.
Зависимости
На вкладке Current Controller, когда вы выбираете Calculate Current Regulator Gains, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Current Controller | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D and Q axis proportional gain, Kp D and Q axis integral gain, Ki | Bandwidth of the current regulator, EV_current | Current Controller |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
D and Q axis integral gain, Ki — Выведенный
scalar
Выведенное интегральное усиление, в V/A*s.
Зависимости
На вкладке Current Controller, когда вы выбираете Calculate Current Regulator Gains, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Current Controller | Зависимость |
|---|
| Параметр | Вкладка |
|---|
D and Q axis proportional gain, Kp D and Q axis integral gain, Ki | Bandwidth of the current regulator, EV_current | Current Controller |
Stator resistance, Rs Stator leakage inductance, Lls Rotor resistance, Rr Rotor leakage inductance, Llr Rotor magnetizing inductance, Lm | Motor Parameters |
Контроллер скорости
Bandwidth of the motion controller, EV_motion — Пропускная способность
vector
Контроллер движения пропускная способность, в Гц. Установите первый элемент вектора к желаемой частоте среза. Установите вторые и третьи элементы вектора к частотам среза высшего порядка. Можно установить значение следующего элемента к 1/5 значение предыдущего элемента. Например, если желаемая частота среза является Гц 20, задайте [20 4 0.8].
Зависимости
Параметр включен, когда параметр Control Type устанавливается на Speed Control.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Bandwidth of the motion controller, EV_motion | Proportional gain, ba Angular gain, Ksa Rotational gain, Kisa | Speed Controller |
Bandwidth of the state filter, EV_sf — Пропускная способность
scalar
Пропускная способность фильтра состояния, в Гц.
Зависимости
Параметр включен, когда параметр Control Type устанавливается на Speed Control.
| Параметр | Используемый, чтобы вывести |
|---|
| Параметр | Вкладка |
|---|
Bandwidth of the state filter, EV_sf | Speed time constant, Ksf | Speed Controller |
Calculate Speed Regulator Gains — Выведите параметры
кнопка
Щелкните, чтобы вывести параметры.
Зависимости
На вкладке Speed Controller, когда вы выбираете Calculate Speed Regulator Gains, блок вычисляет выведенные параметры. Таблица суммирует выведенные параметры, которые зависят от других параметров блоков.
| Выведенный Параметр на вкладке Speed Controller | Зависит от |
|---|
| Параметр | Вкладка |
|---|
Proportional gain, ba | | Bandwidth of the motion controller, EV_motion Bandwidth of the state filter, EV_sf | Speed Controller |
Angular gain, Ksa | | Sample time for the torque control, Tst | Current Controller |
| Rotational gain, Kisa | | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Speed time constant, Ksf | |
Inertia compensation, Jcomp | Jcomp = Jp | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Viscous damping compensation, Fv | Fv |
Static friction, Fs | Fs |
Уравнения используют эти переменные.
| P | Моторные пары полюса |
| ba | Регулятор скорости пропорциональное усиление |
| Ksa | Усиление интеграла регулятора скорости |
| Kisa | Усиление двойного интеграла регулятора скорости |
| Ksf | Временная константа регулятора скорости |
| Jp | Моторная инерция |
| EVsf | Пропускная способность фильтра состояния |
| EVmotion | Контроллер движения пропускная способность |
Proportional gain, ba — Выведенный
scalar
Выведенное пропорциональное усиление, в N · m / (rad/s).
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Proportional gain, ba | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Bandwidth of the motion controller, EV_motion | Speed Controller |
Angular gain, Ksa — Выведенный
scalar
Выведенное угловое усиление, в N · m/rad.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Angular gain, Ksa | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Bandwidth of the motion controller, EV_motion | Speed Controller |
Rotational gain, Kisa — Выведенный
scalar
Выведенное вращательное усиление, в N · m / (rad*s).
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Rotational gain, Kisa | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Bandwidth of the motion controller, EV_motion | Speed Controller |
Speed time constant, Ksf — Выведенный
scalar
Выведенная временная константа скорости, в 1/с.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Speed time constant, Ksf | Sample time for the torque control, Tst | Current Controller |
Bandwidth of the state filter, EV_sf | Speed Controller |
Inertia compensation, Jcomp — Выведенный
scalar
Выведенная компенсация инерции, в kg · m^2.
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Inertia compensation, Jcomp | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Viscous damping compensation, Fv — Выведенный
scalar
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Viscous damping compensation, Fv | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Static friction, Fs — Выведенный
scalar
Выведенное статическое трение, в N · m / (rad/s).
Зависимости
Эта таблица суммирует зависимости от параметра.
| Параметр | Зависимость |
|---|
| Параметр | Вкладка |
|---|
Static friction, Fs | Physical inertia, viscous damping, static friction, Mechanical | Motor Parameters |
Электрические потери
Parameterize losses by — Выберите тип
Single efficiency measurement (значение по умолчанию) | Tabulated loss data | Tabulated efficiency data
| Установка | Блокируйте реализацию |
|---|
Single efficiency measurement | Электрическая потеря вычислила использование постоянного значения для эффективности инвертора. |
Tabulated loss data | Электрическая потеря, вычисленная как функция частот вращения двигателя и крутящих моментов загрузки. |
Tabulated efficiency data | Электрическая потеря вычислила с помощью эффективности инвертора, которая является функцией крутящих моментов загрузки и частот вращения двигателя.
Преобразовывает значения эффективности, которые вы обеспечиваете в потери, и использует сведенные в таблицу потери для симуляции. Игнорирует значения эффективности, вы предусматриваете нулевую скорость или обнуляете крутящий момент. Потери приняты нуль, когда или крутящий момент или скорость являются нулем. Линейная интерполяция использования, чтобы определить потери. Обеспечьте сведенные в таблицу данные для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени. Не экстраполирует значения потерь для скорости и закручивает значения, которые превышают область значений таблицы.
|
Для лучшой практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность заболевает заданная для нулевой скорости или нулевого крутящего момента.
Можно объяснить постоянные составляющие потерь, которые все еще присутствуют для нулевой скорости или крутящего момента.
Overall inverter efficiency, eff — Постоянный
scalar
Полная эффективность инвертора, Eff, в %.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated loss data.
Vector of speeds (w) for tabulated loss, w_loss_bp — Точки останова
1-by-M матрица
Скорость устанавливает точки останова для интерполяционной таблицы при вычислении потерь в rad/s.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated loss data.
Vector of torques (T) for tabulated loss, T_loss_bp — Точки останова
1-by-N матрица
Закрутите точки останова для интерполяционной таблицы при вычислении потерь в N · m.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated loss data.
Corresponding losses, losses_table — Таблица
M-by-N матрица
Массив значений за электрические потери как функция скоростей M и крутящих моментов N, в W. Каждое значение задает потери для определенной комбинации скорости и крутящего момента. Матричный размер должен совпадать с размерностями, заданными векторами крутящего момента и скоростью.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated loss data.
Vector of speeds (w) for tabulated efficiency, w_eff_bp — Точки останова
1-by-M матрица
Скорость устанавливает точки останова для интерполяционной таблицы при вычислении эффективности в rad/s.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated efficiency data.
Vector of torques (T) for tabulated efficiency, T_eff_bp — Точки останова
1-by-N матрица
Закрутите точки останова для интерполяционной таблицы при вычислении эффективности в N · m.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated efficiency data.
Corresponding efficiency, efficiency_table — Таблица
M-by-N матрица
Массив эффективности как функция скоростей M и крутящего момента N, в %. Каждое значение задает эффективность для определенной комбинации скорости и крутящего момента. Матричный размер должен совпадать с размерностями, заданными векторами крутящего момента и скоростью.
Блок игнорирует значения эффективности для нулевой скорости или нулевого крутящего момента. Потери являются нулем, когда или крутящий момент или скорость являются нулем. Блок использует линейную интерполяцию.
Чтобы получить желаемый уровень точности для более низких условий степени, можно обеспечить сведенные в таблицу данные для низких скоростей и низких крутящих моментов.
Зависимости
Чтобы включить этот параметр, для Parameterize losses by, выбирают Tabulated efficiency data.
Ссылки
[1] Лоренц, Роберт Д., Томас Липо и Дональд В. Новотни. “Движение управляет с асинхронными двигателями”. Продолжения IEEE®, Издания 82, Выпуска 8, август 1994, стр 1215–1240.
[2] Shigeo Morimoto, Masayuka Sanada, Еджи Такеда. “Операция широкой скорости внутреннего постоянного магнита синхронные двигатели с высокоэффективным текущим регулятором”. Транзакции IEEE на Промышленных Приложениях, Издании 30, Выпуске 4, июль/август 1994, стр 920–926.
[3] Муйанг Ли. “Ослабляющее поток управление для постоянного магнита синхронные двигатели на основе Z-исходных инверторов”. Магистерская диссертация, Университет Маркетт, e-Publications@Marquette, осень 2014 года.
[4] Briz, Фернандо, Майкл В. Дегнер и Роберт Д. Лоренц. "Анализ и проектирование текущих регуляторов, использующих комплексные векторы". Транзакции IEEE на Промышленных Приложениях, Издании 36, Выпуске 3, Могут/Июнь 2000, стр 817–825.
[5] Briz, Фернандо, и др. "Текущий и регулирование потока в ослабляющей поле операции [асинхронных двигателей]. "Транзакции IEEE на Промышленных Приложениях, Издании 37, Выпуске 1, Яне/Феврале 2001, стр 42–50.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2017a