Программное обеспечение AUTOSAR Blockset поддерживает моделирование компонента программного обеспечения AUTOSAR для Адаптивной Платформы AUTOSAR. Чтобы разработать адаптивный компонент программного обеспечения AUTOSAR в Simulink®, создайте модель Simulink, которая представляет адаптивный компонент программного обеспечения AUTOSAR. Инициируйте образцовое создание одним из этих способов:
Импортируйте существующий AUTOSAR XML (arxml) описание компонента в окружение Simulink как модель. Вы импортируете описание компонента при помощи средства импорта arxml AUTOSAR.
Переделайте существующую модель Simulink в представление адаптивного компонента программного обеспечения AUTOSAR.
При запуске с шаблона модели AUTOSAR Blockset создайте модель Simulink.
После создания первоначального образцового проекта совершенствуйте алгоритмическое содержимое.
Этот пример показывает представление демонстрационной модели адаптивного компонента программного обеспечения AUTOSAR.
Открытая модель LaneGuidance.
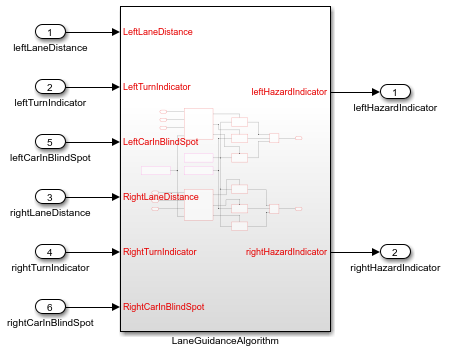
Исследуйте модель. Это состоит из подсистемы, LaneGuidanceAlgorithm. Подсистема имеет шесть импорта, который представляет требуемые порты адаптивного компонента программного обеспечения AUTOSAR: leftLaneDistance, leftTurnIndicator, leftCarInBlindSpot, rightLaneDistance, rightTurnIndicator и rightCarInBlindSpot. Два выходных порта представляют порты провайдера: leftHazardIndicator и rightHazardIndicator.
Установите образцовый параметр конфигурации System target file на autosar_adaptive.tlc. Та системная установка конечного файла включает использование AUTOSAR Blocksetsoftware и влияет на другие образцовые настройки параметра конфигурации. Например:
Language установлен в C++.
Generate code only выбран.
Toolchain установлен в AUTOSAR Adaptive | CMake.
Code interface packaging установлен в C++ class.
В верхнем уровне модели, настроенной основанной на событии коммуникации. Адаптивный компонент программного обеспечения AUTOSAR обеспечивает и использует сервисы. Каждый компонент содержит:
Алгоритм, который выполняет задачи в ответ на полученные события
Требуемые и обеспеченные порты, каждый сопоставленный с сервисным интерфейсом
Сервисные интерфейсы, со связанными событиями и сопоставленными пространствами имен
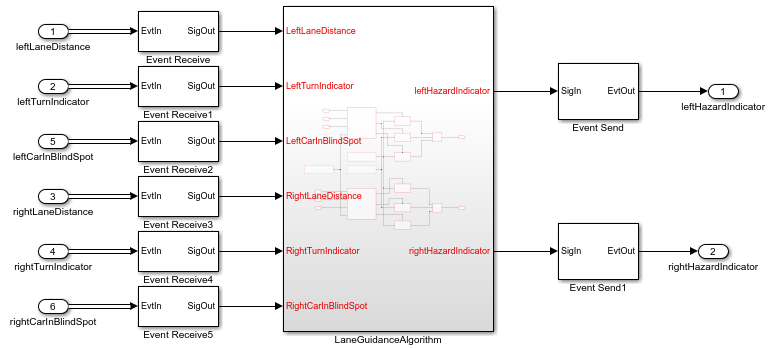
AUTOSAR Blockset обеспечивает, Событие Получают, и Событие Отправляют блоки, чтобы сделать необходимое событие и связи сигнала.
После каждого корневого импорта добавьте блок Event Receive, который преобразовывает входное событие в сигнал при сохранении значений сигналов и типа данных.
Перед каждым корневым выходным портом добавьте блок Event Send, который преобразовывает входной сигнал в событие при сохранении значений сигналов и типа данных.
Чтобы ускорить вставку блока, можно скопировать блоки события от завершенной версии модели autosar_LaneGuidance в качестве примера.
Исследуйте настройку модели. Настройки решателя:
Type установлен в Fixed-step.
Solver установлен в auto (Automatic solver selection).
Fixed-step size (fundamental sample time) установлен в 1/10.
Periodic same time constraint установлен в Unconstrained.
В Редакторе Simulink можно включить шаг расчета, наносят цветную маркировку путем выбора Display > Sample Time > Colors. Легенда шага расчета показывает неявную группировку уровня. Легенда для этой модели показывает, что модель использует один уровень 0,1 секунд. Модель моделирует в однозадачном режиме.
Сохраните модель в перезаписываемую папку на вашем текущем пути поиска файлов MATLAB®. Назовите файл my_autosar_LaneGuidance.slx.
Затем, сконфигурируйте элементы адаптивного компонента программного обеспечения AUTOSAR для использования в среде моделирования Simulink.
