Компенсируйте неустойчивость I/Q
Система IQImbalanceCompensator object™ компенсирует неустойчивость между синфазными компонентами и квадратурными компонентами модулируемого сигнала.
Компенсировать неустойчивость I/Q:
Задайте и настройте объект IQImbalanceCompensator. Смотрите Конструкцию.
Вызовите step, чтобы компенсировать неустойчивость I/Q согласно свойствам comm.IQImbalanceCompensator. Поведение step характерно для каждого объекта в тулбоксе.
Адаптивный алгоритм, свойственный к компенсатору неустойчивости I/Q, совместим с M-PSK, M-QAM и схемами модуляции OFDM, где M>2.
Вывод компенсатора может масштабироваться и вращаться, то есть, умножаться на комплексное число относительно ссылочной совокупности. На практике это не проблема, когда получатели исправляют для этого до демодуляции с помощью оценки канала.
При запуске в R2016b, вместо того, чтобы использовать метод step, чтобы выполнить операцию, заданную Системой object™, можно вызвать объект с аргументами, как будто это была функция. Например, y = step(obj,x) и y = obj(x) выполняют эквивалентные операции.
H = comm.IQImbalanceCompensator создает Системный объект компенсатора, H, который компенсирует неустойчивость между синфазными компонентами и квадратурными компонентами входного сигнала.
H = comm.IQImbalanceCompensator( создает объект компенсатора неустойчивости I/Q, Name,Value)H, с каждым заданным набором свойства Name к заданному Value. Можно задать дополнительные аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN).
|
Источник коэффициентов компенсатора Задайте или |
|
Начальный коэффициент раньше компенсировал неустойчивость I/Q Начальный коэффициент является комплексным скаляром, который может быть или одинарный или двойная точность. Значением по умолчанию является |
|
Источник размера шага для содействующей адаптации Задайте или |
|
Размер шага адаптации Задает размер шага, используемый алгоритмом в оценке неустойчивости I/Q. Это свойство доступно только, когда |
|
Создает входной порт, чтобы управлять содействующей адаптацией компенсатора Когда этим логическим свойством является |
|
Создайте порт, чтобы вывести коэффициенты компенсатора Когда этим логическим свойством является |
| сброс | Сбросьте состояния Системного объекта IQImbalanceCompensator |
| шаг | Компенсируйте Неустойчивость I/Q |
| Характерный для всех системных объектов | |
|---|---|
release | Позвольте изменения значения свойства Системного объекта |
Смягчите влияние амплитуды и неустойчивости фазы на QPSK модулируемый сигнал при помощи коммуникации. Системный объект IQImbalanceCompensator?.
Создайте объект схемы совокупности. Задайте пары "имя-значение", чтобы гарантировать, что схема совокупности отображает только последние 100 символов данных.
constDiagram = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',100);
Создайте компенсатор неустойчивости I/Q.
iqImbComp = comm.IQImbalanceCompensator;
Сгенерируйте случайные символы данных и примените модуляцию QPSK.
data = randi([0 3],1e7,1); txSig = pskmod(data,4,pi/4);
Примените амплитуду и неустойчивость фазы к переданному сигналу.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте схему совокупности полученного сигнала. Заметьте, что полученный сигнал испытал сдвиг фазы и амплитуда.
constDiagram(rxSig)

Примените алгоритм компенсации I/Q и просмотрите совокупность. Компенсированное сигнальное созвездие почти выравнивается со ссылочной совокупностью.
compSig = iqImbComp(rxSig); constDiagram(compSig)

Компенсируйте амплитуду и неустойчивость фазы на сигнале 8-PSK при помощи Системы comm.IQImbalanceCompensator object™ с внешними коэффициентами.
Создайте модулятор 8-PSK, и совокупность схематически изображают Системные объекты. Используйте пары "имя-значение", чтобы гарантировать, что схема совокупности отображает только последние 100 символов данных и обеспечить ссылочную совокупность.
hMod = comm.PSKModulator(8); refC = constellation(hMod); hScope = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',100, ... 'ReferenceConstellation',refC);
Создайте объект компенсатора неустойчивости I/Q с входным портом для коэффициентов алгоритма.
hIQComp = comm.IQImbalanceCompensator('CoefficientSource','Input port');
Сгенерируйте случайные символы данных и примените модуляцию 8-PSK.
data = randi([0 7],1000,1); txSig = step(hMod,data);
Примените амплитуду и неустойчивость фазы к переданному сигналу.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте схему совокупности полученного сигнала. Заметьте, что полученный сигнал испытал сдвиг фазы и амплитуда.
step(hScope,rxSig);

Используйте функцию iqimbal2coef, чтобы определить коэффициент компенсации, учитывая неустойчивость фазы и амплитуду.
compCoef = iqimbal2coef(ampImb,phImb);
Примените коэффициент компенсации к полученному сигналу с помощью функции step объекта comm.IQImbalanceCompensator и просмотрите результирующую совокупность. Вы видите, что компенсированное сигнальное созвездие теперь почти выравнивается со ссылочной совокупностью.
compSig = step(hIQComp,rxSig,compCoef); step(hScope,compSig)

Удалите неустойчивость I/Q из 64-QAM сигнала и сделать предполагаемые коэффициенты внешне доступными при установке размера шага алгоритма от входного порта.
Создайте объект схемы совокупности. Используйте пары "имя-значение", чтобы гарантировать, что схема совокупности отображает только последние 256 символов данных, установила пределы осей и задает ссылочную совокупность.
M = 64; refC = qammod(0:M-1,M); constDiagram = comm.ConstellationDiagram(... 'SymbolsToDisplaySource','Property', ... 'SymbolsToDisplay',256, ... 'XLimits',[-10 10],'YLimits',[-10 10], ... 'ReferenceConstellation',refC);
Создайте Системный объект компенсатора неустойчивости I/Q, в котором размер шага задан как входной параметр, и предполагаемые коэффициенты сделаны доступными через выходной порт.
iqImbComp = comm.IQImbalanceCompensator('StepSizeSource','Input port', ... 'CoefficientOutputPort',true);
Сгенерируйте случайные символы данных и примените 64-QAM модуляцию.
nSym = 25000; data = randi([0 M-1],nSym,1); txSig = qammod(data,M);
Примените амплитуду и неустойчивость фазы к переданному сигналу.
ampImb = 2; % dB phImb = 10; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Постройте схему совокупности полученного сигнала.
constDiagram(rxSig);

Задайте параметр размера шага для компенсатора неустойчивости I/Q.
stepSize = 1e-5;
Компенсируйте неустойчивость I/Q при установке размера шага через входной параметр. Вы видите, что компенсированное сигнальное созвездие теперь почти выравнивается со ссылочной совокупностью.
[compSig,estCoef] = iqImbComp(rxSig,stepSize); constDiagram(compSig)

Постройте действительные и мнимые значения предполагаемых коэффициентов. Вы видите, что они достигают установившегося решения.
plot((1:nSym)'/1000,[real(estCoef),imag(estCoef)]) grid xlabel('Symbols (thousands)') ylabel('Coefficient Value') legend('Real','Imag','location','best')

Управляйте алгоритмом адаптации компенсатора неустойчивости I/Q с помощью внешнего аргумента.
Примените модуляцию QPSK к случайным символам данных.
data = randi([0 3],600,1);
txSig = pskmod(data,4,pi/4,'gray');Создайте компенсатор неустойчивости I/Q, в котором алгоритмом адаптации управляют через входной порт, размер шага задан через свойство StepSize, и предполагаемые коэффициенты сделаны доступными через выходной порт.
iqImbComp = comm.IQImbalanceCompensator('AdaptInputPort',true, ... 'StepSize',0.001,'CoefficientOutputPort',true);
Примените амплитуду и неустойчивость фазы к переданному сигналу.
ampImb = 5; % dB phImb = 15; % deg gainI = 10.^(0.5*ampImb/20); gainQ = 10.^(-0.5*ampImb/20); imbI = real(txSig)*gainI*exp(-0.5i*phImb*pi/180); imbQ = imag(txSig)*gainQ*exp(1i*(pi/2 + 0.5*phImb*pi/180)); rxSig = imbI + imbQ;
Повредите операцию компенсации в три сегмента, в которых компенсатор включен для первых 200 символов, отключил для следующих 200 символов и включил для последних 200 символов. Сохраните содействующие данные в трех векторах.
[~,estCoef1] = iqImbComp(rxSig(1:200),true); [~,estCoef2] = iqImbComp(rxSig(201:400),false); [~,estCoef3] = iqImbComp(rxSig(401:600),true);
Конкатенация комплексных коэффициентов алгоритма и графика их действительные и мнимые части.
estCoef = [estCoef1; estCoef2; estCoef3]; plot((1:600)',[real(estCoef) imag(estCoef)]) grid xlabel('Symbols') ylabel('Coefficient Value') legend('Real','Imaginary','location','best')

Заметьте, что коэффициенты не адаптируются в течение времени, в которое отключен компенсатор.
Одно из главных нарушений, влияющих на прямые получатели преобразования, является неустойчивостью между полученным синфазным сигналом и квадратурные компоненты. Вместо того, чтобы улучшать фронтенд, аналоговое оборудование, это более экономически эффективно, чтобы терпеть определенный уровень неустойчивости I/Q и затем реализовать методы компенсации. Основанный на зацикливании слепой алгоритм компенсации используется в качестве основания для Компенсатора Неустойчивости I/Q.
Обобщенную модель неустойчивости I/Q показывают, где g является амплитудной неустойчивостью, и ϕ является неустойчивостью фазы (идеально, g = 1 и ϕ = 0). В фигуре H(f) является номинальной частотной характеристикой ответвлений из-за, например, lowpass фильтры. HI(f) и HQ(f) представляют фрагменты синфазной амплитуды и квадратурной амплитуды и фазовых откликов, которые отличаются от номинального ответа. С совершенным соответствием, HI(f) = HQ(f) = 1.
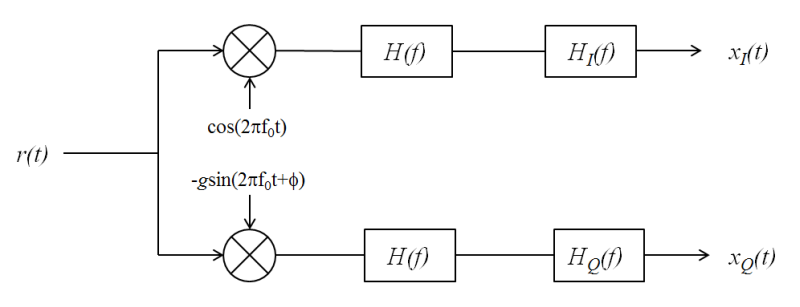
Позвольте z(t) быть идеальным основополосным эквивалентным сигналом полученного сигнала, r(t), где его преобразование Фурье обозначается как Z(f). Учитывая обобщенную модель неустойчивости I/Q, преобразование Фурье неустойчивого сигнала, x(t) = xI(t) + xQ(t),
где G1(f) и G2(f) являются прямыми и сопряженными компонентами неустойчивости I/Q. Эти компоненты заданы как
Применяя обратное преобразование Фурье к X(f), модель сигнала становится x(t) = g1(t) * z(t) + g2(t) * z*(t).
Это предлагает структуру компенсатора как показано, в которой обозначение дискретного времени используется, чтобы выразить переменные. Компенсированный сигнал выражается как y (n) = x(n) + wx*(n).
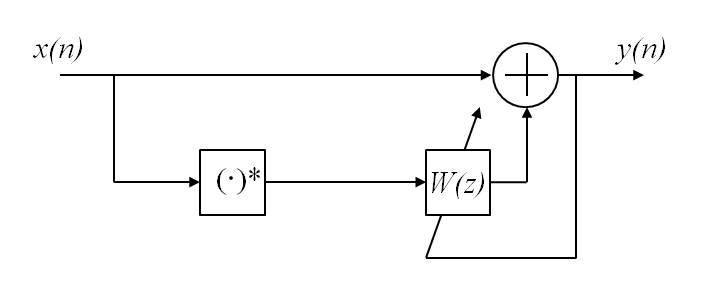
Простой алгоритм формы
используется, чтобы определить веса, потому что это гарантирует, что вывод является “соответствующим”, то есть, [1]. Начальное значение w определяется свойством InitialCoefficient, которое имеет значение по умолчанию 0 + 0i. M является размером шага, как задано в свойстве StepSize.
[1] Anttila, L., М. Волкама и М. Ренфорс. “Слепая компенсация выборочной частотой неустойчивости I/Q в квадратурных радиоприемниках: основанный на зацикливании подход”, Proc. IEEE ICASSP, стр. III-245–248, 2007.
[2] Kiayani, A., Л. Анттила, И. Цзоу и М. Волкама, “Усовершенствованный проект получателя для смягчения нескольких нарушений РФ в системах OFDM: алгоритмы и измерения РФ”, журнал электротехники и вычислительной техники, издания 2012.
Компенсатор Неустойчивости I/Q | iqcoef2imbal | iqimbal2coef
