Компенсируйте модулируемые сигналы с помощью фильтрации обратной связи решения
Communications Toolbox / Эквалайзеры
![]()
Блок Decision Feedback Equalizer использует строку задержки касания фильтра обратной связи решения со взвешенной суммой, чтобы компенсировать модулируемые сигналы, переданные через дисперсионный канал. Используя оценку канала, смоделированного как фильтр конечного входного ответа (FIR), блок обрабатывает входные кадры и выводит предполагаемый сигнал.
Этот значок показывает блок со всеми портами, включенными для настроек, которые используют LMS или адаптивный алгоритм RLS.
![]()
Этот значок показывает блок со всеми портами, включенными для настроек, которые используют CMA адаптивный алгоритм.
![]()
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Эквалайзер обратной связи решения (DFE) является нелинейным эквалайзером, который уменьшает интерференцию межсимвола (ISI) в выборочных частотой каналах. Если пустой указатель существует в частотной характеристике канала, DFEs не улучшают шум. DFE состоит из коснувшейся строки задержки, которая хранит выборки от входного сигнала и содержит прямой фильтр и фильтр обратной связи. Прямой фильтр подобен линейному эквалайзеру, в то время как фильтр обратной связи содержит коснувшуюся строку задержки, входные параметры которой являются решениями, принятыми о компенсируемом сигнале. Однажды на период символа, эквалайзер выводит взвешенную сумму значений в строке задержки и обновляет веса, чтобы подготовиться к следующему периоду символа.
DFEs может быть расположен с интервалами символом или дробный расположенный с интервалами символом.
Для расположенного с интервалами символом эквалайзера количество выборок на символ, K, равняется 1. Выходная частота дискретизации равняется входной частоте дискретизации.
Для дробного расположенного с интервалами символом эквалайзера количество выборок на символ, K, является целым числом, больше, чем 1. Как правило, K 4 для дробных расположенных с интервалами символом эквалайзеров. Выходная частота дискретизации является 1/T, и входной частотой дискретизации является K/T. Коснитесь обновление веса происходит при норме выработки.
Это схематические показы дробный расположенный с интервалами символом DFE в общей сложности с весами N, периодом символа T и выборками K на символ. Фильтр имеет L прямые веса и N-L веса обратной связи. Прямой фильтр наверху, и фильтр обратной связи в нижней части. Если K равняется 1, результатом является расположенный с интервалами символом DFE вместо дробного расположенного с интервалами символом DFE.
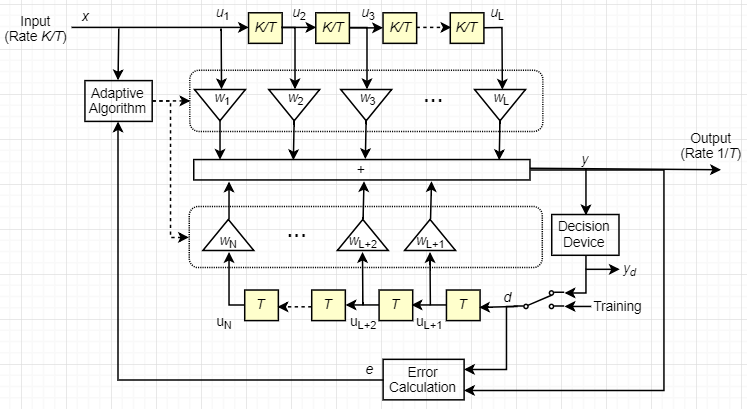
В каждый период символа эквалайзер получает выборки входа K в прямом фильтре, а также одно решение или учебную выборку в фильтре обратной связи. Эквалайзер затем выводит взвешенную сумму значений в форварде и строках задержки обратной связи и обновляет веса, чтобы подготовиться к следующему периоду символа.
Алгоритм для блока Adaptive Algorithm в схематическом совместно оптимизирует веса обратной связи и форвард. Объединенная оптимизация особенно важна для алгоритма RLS.
Для получения дополнительной информации смотрите Коррекцию.


