Следующие данные показывают, что блок-схема Simulink® показывает проблему отслеживания в проекте автопилота самолета. Чтобы открыть эту схему, введите lqrpilot в подсказке MATLAB®.
Ключевые возможности этой схемы, чтобы отметить следующие:
Блок Linearized Dynamics содержит линеаризовавший корпус.
sf_aerodyn является Блок s-function, который содержит нелинейные уравнения для .
Сигнал ошибки между и передается через интегратор. Это помогает в управлении ошибкой обнулить.
Начало со стандартного уравнения пространства состояний
где
Переменные u, v и w являются этими тремя скоростями относительно каркаса кузова, показанного можно следующим образом.
Кадр координаты тела для самолета
Переменные и список и подача, и p, q, и r является списком, подачей и уровнями отклонения от курса, соответственно.
Движущие силы корпуса нелинейны. Следующее уравнение показывает нелинейные компоненты, добавленные к уравнению пространства состояний.
Нелинейный компонент уравнения пространства состояний
Чтобы видеть численные значения для A и B, ввести
load lqrpilot A, B
в посдказке MATLAB.
В целях проекта LQG нелинейные движущие силы обрезаются в и p, q, r и θ обнуляются. Начиная с u v и w не вводят в нелинейный термин в предыдущей фигуре, это составляет линеаризацию вокруг со всеми остающимися обнуленными состояниями. Получившаяся матрица состояния линеаризовавшей модели называется A15.
Цель выполнить устойчивый скоординированный поворот, как показано в этой фигуре.
Самолет, делающий поворот на 60 °
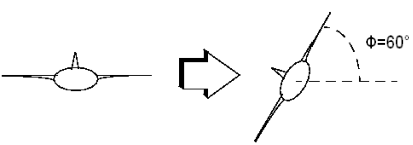
Чтобы достигнуть этой цели, необходимо разработать контроллер, который управляет устойчивым поворотом путем прохождения через списка на 60 °. Кроме того, примите, что θ, угол подачи, требуется, чтобы оставаться максимально близко к нулю.
Вычислить матрицу усиления LQG, K, тип
lqrdes
в посдказке MATLAB. Затем запустите модель lqrpilot с нелинейной модели, sf_aerodyn, выбранного.
Эти данные показывают ответ к команде шага на 60 °.
Отслеживание команды шага списка
Как вы видите, системные дорожки, 60 °, которыми управляют, сыплют приблизительно 60 секунд.
Другая цель состояла в том, чтобы сохранить θ, угол подачи, относительно маленький. Эти данные показывают, как хорошо контроллер LQG сделал.
Минимизируя смещение в углу подачи, тете
Наконец, эти данные показывают входные параметры управления.
Управляйте входными параметрами для LQG отслеживание проблемы
Попытайтесь настроить Q и матрицы R в lqrdes.m и осмотреть входные параметры управления и системные состояния, убедившись повторно выполнять lqrdes, чтобы обновить усиление LQG матричный K. Методом проб и ошибок можно улучшить время отклика этого проекта. Кроме того, сравните линейные и нелинейные проекты, чтобы видеть эффекты нелинейности на производительности системы.
