Этот пример показывает, как использовать PID Tuner, чтобы соответствовать линейной модели к измеренным данным об ответе SISO.
Если у вас есть программное обеспечение System Identification Toolbox™, можно использовать PID Tuner, чтобы оценить параметры линейной модели объекта управления на основе данных об ответе временного интервала, измеренных от системы. PID Tuner затем настраивает ПИД-регулятор для получившейся предполагаемой модели. PID Tuner дает вам несколько методов графически, вручную, или автоматически настройте предполагаемую модель, чтобы совпадать с вашими данными об ответе. Этот пример иллюстрирует некоторые из тех методов.
В этом примере вы загружаете измеренные данные об ответе из файла данных в рабочую область MATLAB®, вы представляете объект как модель LTI. Для получения информации о генерации моделируемых данных из модели Simulink® смотрите В интерактивном режиме Оценочный Объект от Измеренных или Моделируемых Данных об Ответе (Simulink Control Design).
Откройте PID Tuner и загрузите измеренные данные об ответе в рабочее пространство MATLAB.
pidTuner(tf(1),'PI') load PIDPlantMeasuredIOData
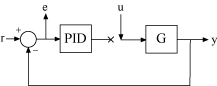
Когда вы импортируете данные об ответе, PID Tuner принимает, что ваши результаты измерений представляют объект, соединенный с ПИД-регулятором в цикле отрицательной обратной связи. Другими словами, PID Tuner принимает следующую структуру для вашей системы. PID Tuner принимает, что вы ввели сигнал шага во входе u объекта и измерили отклик системы в y, как показано.
Файл выборочных данных для этого примера, содержит три переменные, каждая из которых 501 1 массив. inputu является модульной ступенчатой функцией, введенной в u, чтобы получить данные об ответе. outputy является измеренным ответом системы в y. Временной вектор t, выполнения от 0 до 50 с с 0,1 шагами расчета с. Сравнение inputu к t показывает, что шаг происходит в t = 5 с.
Можно импортировать данные об ответе, хранимые как числовой массив (как в этом примере), объект timeseries или объект iddata.
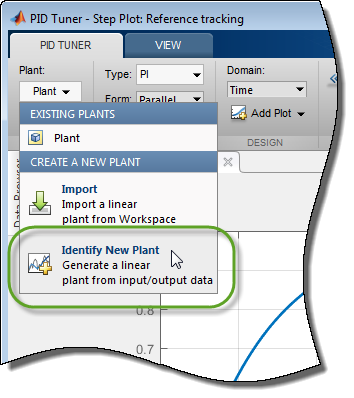
В PID Tuner, в меню Plant, выбирают Identify New Plant.
Во вкладке Plant Identification нажмите![]() Get I/O data и выберите Step Response. Это действие открывает диалоговое окно Import Step Response.
Get I/O data и выберите Step Response. Это действие открывает диалоговое окно Import Step Response.
Введите информацию о данных об ответе. Выходной сигнал является измеренным откликом системы, outputy. Входной сигнал шага параметризован как показано в схеме в диалоговом окне. Здесь, введите 5 для Onset Lag и 0.1 для Sample Time. Затем нажмите![]() Import.
Import.
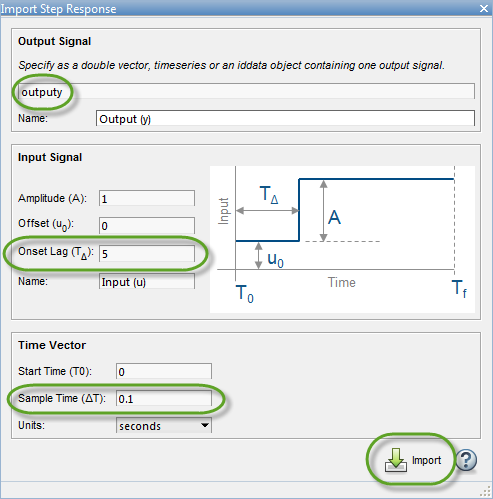
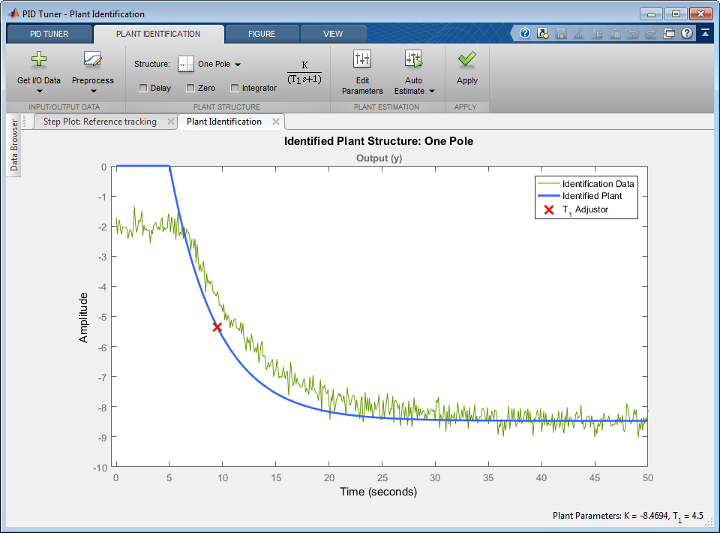
График Plant Identification отображает данные об ответе, и ответ начальной буквы оценил объект.
В зависимости от качества и функций ваших данных об ответе, вы можете хотеть выполнить некоторую предварительную обработку на данных, чтобы улучшить предполагаемые результаты объекта. PID Tuner предоставляет несколько возможностей для предварительной обработки данных об ответе, таких как удаление смещений, фильтрация или извлечение подмножества данных. В этом примере данные об ответе имеют смещение. Это важно для хороших идентификационных результатов удалить смещения данных. Используйте меню Preprocess, чтобы сделать так. (Для получения информации о других опциях предварительной обработки данных смотрите, Предварительно обрабатывают Данные.)
На вкладке Plant Identification нажмите![]() Preprocess и выберите
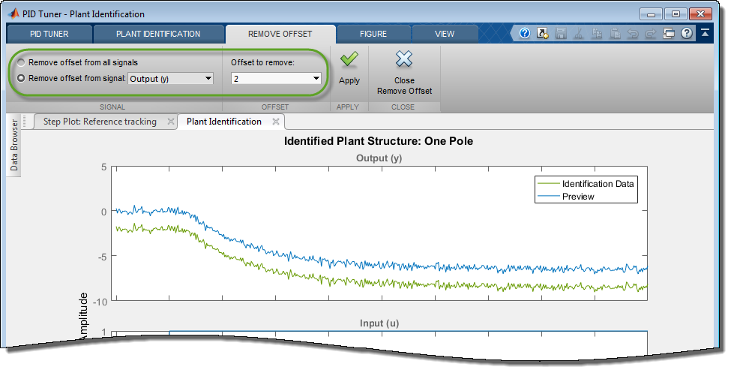
Preprocess и выберите Remove Offset. Вкладка Remove Offset открывается, отображая графики временной зависимости данных об ответе и соответствующего входного сигнала.
Выберите Remove offset from signal и выберите ответ, Output (y). В текстовом поле Offset to remove задайте значение 2. Можно также выбрать начальное значение сигнала или предупредить о среднем значении или ввести численное значение. График обновляет с дополнительной трассировкой, показывающей сигнал с примененным смещением.
Нажмите![]() Apply, чтобы сохранить изменение в сигнале. Нажмите
Apply, чтобы сохранить изменение в сигнале. Нажмите![]() Close Remove Offset, чтобы возвратиться к вкладке Plant Identification.
Close Remove Offset, чтобы возвратиться к вкладке Plant Identification.
PID Tuner автоматически настраивает параметры объекта, чтобы создать новое исходное предположение для объекта на основе предварительно обработанного сигнала ответа.
PID Tuner позволяет вам задавать структуру объекта, такую как One Pole, Underdamped Pair или State-Space Model. В меню Structure выберите структуру объекта что лучшие соответствия ваш ответ. Можно также добавить транспортную задержку, нуль или интегратор к объекту. В данном примере однополюсная структура дает качественно правильный ответ. Можно внести дальнейшие корректировки в структуру объекта и значения параметров, чтобы сделать ответ предполагаемой системы лучшим соответствием к измеренным данным об ответе.
PID Tuner дает вам несколько способов настроить параметры объекта:
Графически настройте ответ предполагаемой системы путем перетаскивания корректоров на графике. В этом примере перетащите красный x, чтобы настроить предполагаемую временную константу объекта. PID Tuner повторно вычисляет системные параметры, как вы делаете так. Когда вы изменяете ответ предполагаемой системы, становится очевидно, что существует некоторая задержка между приложением входа шага в t = 5 с и ответом системы к тому входу шага.
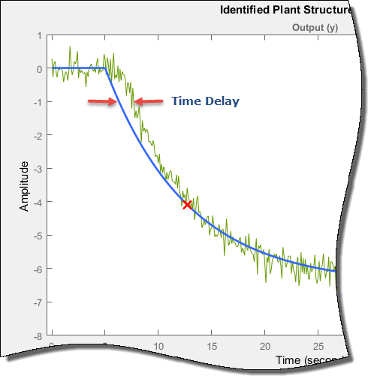
Добавить транспортную задержку с предполагаемой моделью объекта управления, в разделе Plant Structure, Delay проверки. Вертикальная строка появляется на графике, указывая на текущее значение задержки. Перетащите строку, левую или правую, чтобы изменить задержку и внести дальнейшие корректировки в отклик системы путем перетаскивания красного x.
Настройте численные значения системных параметров, такие как усиления, временные константы и задержки. Чтобы численно настроить значения системных параметров, нажмите![]() Edit Parameters.
Edit Parameters.
Предположим, что вы знаете от независимого измерения, что транспортная задержка вашей системы составляет 1,5 секунды. В диалоговом окне Plant Parameters войдите 1.5 для τ. Проверяйте Fix, чтобы зафиксировать значение параметров. Когда вы проверяете Fix на параметр, ни графические ни автоматические настройки предполагаемой модели объекта управления не влияют на то значение параметров.

Автоматически оптимизируйте системные параметры, чтобы совпадать с измеренными данными об ответе. Нажмите![]() Auto Estimate, чтобы обновить предполагаемые системные параметры с помощью текущих значений в качестве исходного предположения.
Auto Estimate, чтобы обновить предполагаемые системные параметры с помощью текущих значений в качестве исходного предположения.
Графически настройте ответ предполагаемой системы путем перетаскивания корректоров на графике. В этом примере перетащите красный x, чтобы настроить предполагаемую временную константу объекта. PID Tuner повторно вычисляет системные параметры, как вы делаете так. Когда вы изменяете ответ предполагаемой системы, становится очевидно, что существует некоторая задержка между приложением входа шага в t = 5 с и ответом системы к тому входу шага.
Добавить транспортную задержку с предполагаемой моделью объекта управления, в разделе Plant Structure, Delay проверки. Вертикальная строка появляется на графике, указывая на текущее значение задержки. Перетащите строку, левую или правую, чтобы изменить задержку и внести дальнейшие корректировки в отклик системы путем перетаскивания красного x.
Настройте численные значения системных параметров, такие как усиления, временные константы и задержки. Чтобы численно настроить значения системных параметров, нажмите![]() Edit Parameters.
Edit Parameters.
Предположим, что в этом примере вы знаете от независимого измерения, что транспортная задержка вашей системы составляет 1,5 с. В диалоговом окне Plant Parameters введите 1.5 для τ. Чтобы зафиксировать значение задержки, проверяйте Fix. Когда вы проверяете Fix на параметр, ни графические ни автоматические настройки предполагаемой модели объекта управления не влияют на значение параметров.
Автоматически оптимизируйте системные параметры, чтобы совпадать с измеренными данными об ответе. Нажмите ![]() Auto Estimate, чтобы обновить предполагаемые системные параметры с помощью текущих значений в качестве исходного предположения.
Auto Estimate, чтобы обновить предполагаемые системные параметры с помощью текущих значений в качестве исходного предположения.
Можно продолжить выполнять итерации использования любого из этих методов, чтобы настроить структуру объекта и значения параметров, пока ответ предполагаемой системы соответственно не совпадает с измеренным ответом.
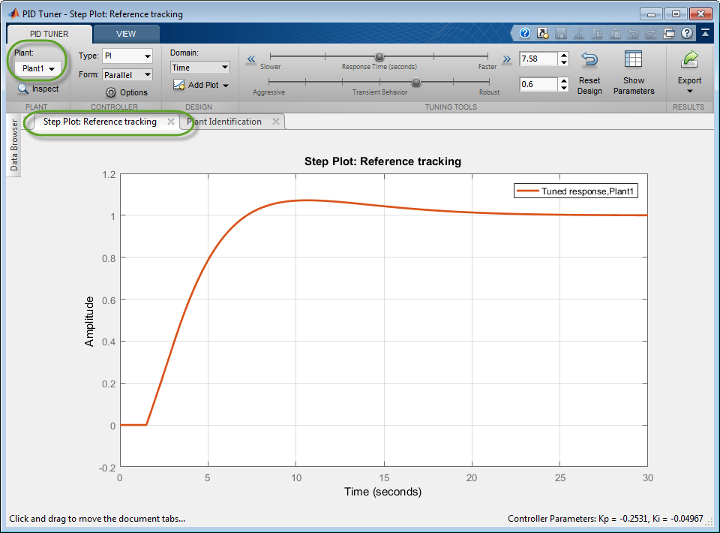
Когда вы будете удовлетворены подгонкой, нажмите![]() Apply. Выполнение так сохраняет предполагаемый объект,
Apply. Выполнение так сохраняет предполагаемый объект, Plant1, к рабочей области PID Tuner. PID Tuner автоматически разрабатывает контроллер PI для Plant1 и, в графике Step Plot: Reference Tracking, отображает новый ответ с обратной связью. Меню Plant отражает, что Plant1 выбран для текущего проектирования контроллера.
Чтобы исследовать переменные, сохраненные в рабочей области PID Tuner, откройте Data Browser.
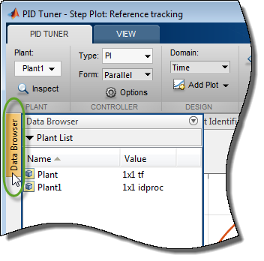
Можно теперь использовать инструменты PID Tuner, чтобы совершенствовать проектирование контроллера для предполагаемого объекта и исследовать настроенные отклики системы.
Можно также экспортировать идентифицированный объект от рабочей области PID Tuner до рабочего пространства MATLAB для последующего анализа. На вкладке PID Tuner нажмите![]() Export. Проверяйте модель объекта управления, которую вы хотите экспортировать в рабочее пространство MATLAB. В данном примере экспортируйте
Export. Проверяйте модель объекта управления, которую вы хотите экспортировать в рабочее пространство MATLAB. В данном примере экспортируйте Plant1, объект, который вы идентифицировали от данных об ответе. Можно также экспортировать настроенный ПИД-регулятор. Нажмите![]() OK. Модели, которые вы выбрали, сохранены в рабочее пространство MATLAB.
OK. Модели, которые вы выбрали, сохранены в рабочее пространство MATLAB.
Идентифицированные модели объекта управления сохранены как идентифицированные модели LTI, такие как idproc или idss.
Также щелкните правой кнопкой по объекту по Data Browser, чтобы выбрать его для настройки или экспортировать его в рабочее пространство MATLAB.

