Проект диаграммы Боде является интерактивным графическим методом изменения компенсатора, чтобы достигнуть определенного ответа разомкнутого цикла (формирование цикла). Чтобы в интерактивном режиме сформировать ответ разомкнутого цикла с помощью Control System Designer, используйте Bode Editor. В редакторе можно настроить пропускную способность разомкнутого цикла и проект к спецификациям запаса по амплитуде и фазе.
Чтобы настроить форму цикла, можно добавить полюса и нули к компенсатору и настроить их значения непосредственно в Bode Editor, или можно использовать Редактор Компенсатора. Для получения дополнительной информации смотрите Динамику Компенсатора Редактирования.
Для получения информации обо всех настраивающих методах, доступных в Control System Designer, смотрите, что Control System Designer Настраивает Методы.
Этот пример показывает, как разработать компенсатор для двигателя постоянного тока с помощью диаграммы Боде графические настраивающие методы.
Модель объекта управления и требования
Передаточная функция объекта двигателя постоянного тока, как описано в Примере SISO: двигатель постоянного тока:
В данном примере конструктивные требования:
Время нарастания меньше чем 0,5 секунд
Установившаяся ошибка меньше чем 5%
Перерегулирование меньше чем 10%
Получите поле, больше, чем 20 дБ
Поле фазы, больше, чем 40 градусов
Открытый Control System Designer
В командной строке MATLAB® создайте модель передаточной функции объекта и откройте Control System Designer в Предвещать настройке Редактора.
G = tf(1.5,[1 14 40.02]);
controlSystemDesigner('bode',G);Приложение открывает и импортирует G как модель объекта управления для архитектуры управления по умолчанию, Configuration 1.
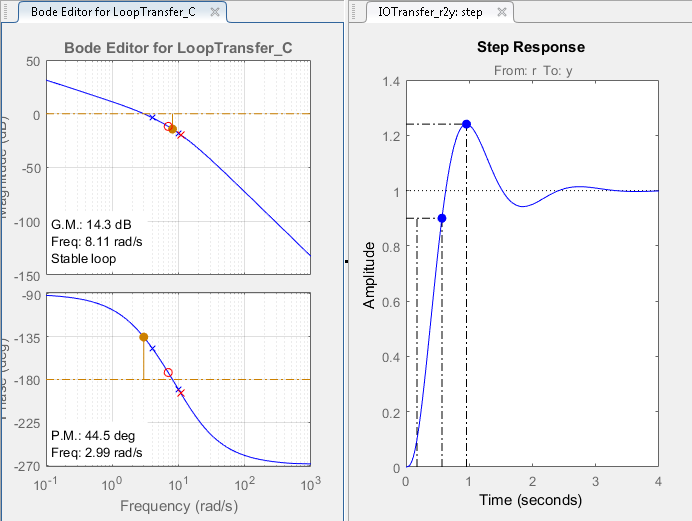
В приложении следующий ответ строит открытый:
Разомкнутый цикл Bode Editor для ответа LoopTransfer_C. Этот ответ является передаточной функцией разомкнутого цикла GC, где C является компенсатором, и G является объектом.
Step Response для ответа IOTransfer_r2y. Этот ответ является передаточной функцией ввода - вывода для полной системы с обратной связью.
Чтобы открыть разомкнутый цикл, Bode Editor, когда Control System Designer уже открыт, на вкладке Control System, в Tuning Methods выпадающий список, выбирает Bode Editor. В диалоговом окне Select Response to Edit выберите существующий ответ на график или создайте New Open-Loop Response.
Чтобы просмотреть частотную характеристику разомкнутого цикла и переходной процесс с обратной связью одновременно, на вкладке Views, нажимают Left/Right.

Отображения приложения Bode Editor и Step Response строят бок о бок.
Настройте пропускную способность
Поскольку проект требует времени нарастания меньше чем 0,5 секунды, установите частоту перекрестного соединения DC разомкнутого цикла приблизительно на 3 рад/с. К приближению первого порядка эта перекрестная частота соответствует временной константе 0,33 секунд.
Чтобы сделать перекрестное соединение легче видеть, включите сетку графика. Щелкните правой кнопкой по области построения Bode Editor и выберите Grid. Приложение добавляет сетку в Предвещать графики ответа.
Чтобы настроить перекрестную частоту увеличивают усиление компенсатора. В графике Bode Editor, в графике ответа Magnitude, перетаскивают ответ вверх. Выполнение так увеличивает усиление компенсатора.

Когда вы перетаскиваете график значения, приложение вычисляет усиление компенсатора и обновляет графики ответа.
Перетащите ответ значения вверх, пока перекрестная частота не составит приблизительно 3 рад/с.

Просмотрите характеристики переходного процесса
Чтобы добавить время нарастания в график Step Response, щелкните правой кнопкой по области построения и выберите Characteristics> Rise Time.
Чтобы просмотреть время нарастания, переместите курсор через индикатор времени нарастания.
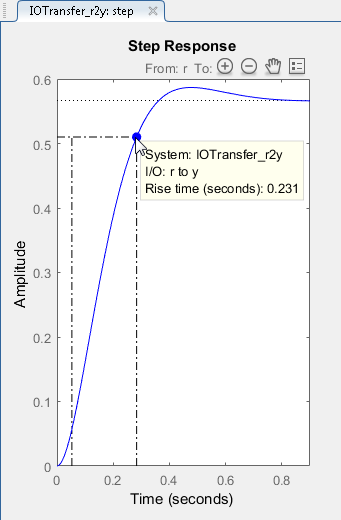
Время нарастания составляет приблизительно 0,23 секунды, который удовлетворяет конструктивные требования.
Точно так же, чтобы добавить максимальную чувствительность в график Step Response, щелкните правой кнопкой по области построения и выберите Characteristics> Peak Response.
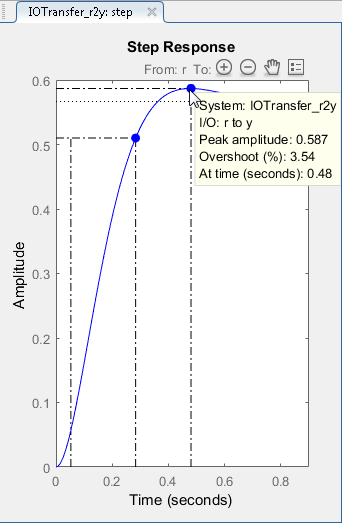
Пиковое перерегулирование составляет приблизительно 3,5%.
Добавьте интегратор в компенсатор
Чтобы удовлетворить 5%-е установившееся ошибочное требование, устраните установившуюся ошибку из переходного процесса с обратной связью путем добавления интегратора в компенсатор. В Bode Editor щелкают правой кнопкой по области построения и выбирают Add Pole/Zero> Integrator.
Добавление интегратора производит нулевую установившуюся ошибку. Однако изменение динамики компенсатора также изменяют перекрестную частоту, увеличение времени нарастания. Чтобы уменьшать время нарастания, увеличьте перекрестную частоту приблизительно до 3 рад/с.
Настройте усиление компенсатора
Чтобы возвратить перекрестную частоту приблизительно в 3 рад/с, увеличьте усиление компенсатора далее. Щелкните правой кнопкой по области построения Bode Editor и выберите Edit Compensator.
В диалоговом окне Compensator Editor, в разделе Compensator, задают усиление 99 и нажимают Enter.
Ответ строит обновление автоматически.
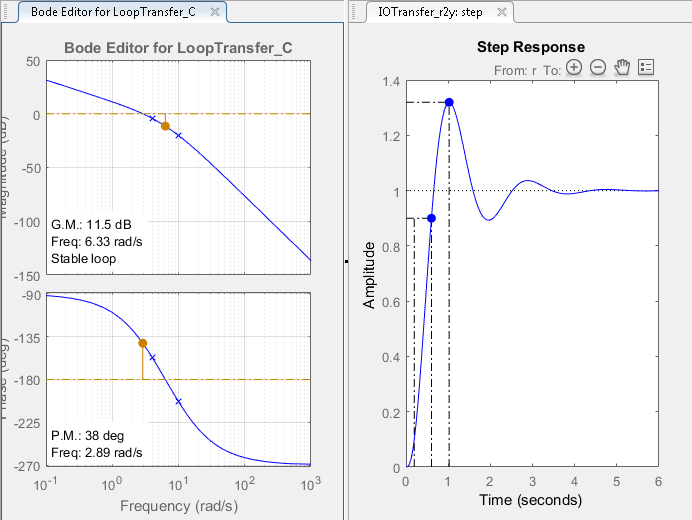
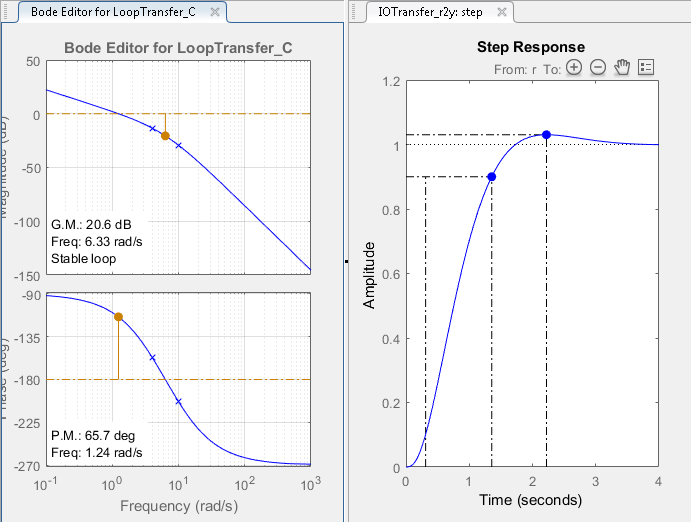
Время нарастания составляет приблизительно 0,4 секунды, который удовлетворяет конструктивные требования. Однако пиковое перерегулирование составляет приблизительно 32%. Компенсатор, состоящий из усиления и интегратора, не достаточен, чтобы соответствовать конструктивным требованиям. Поэтому компенсатор требует дополнительной динамики.
Добавьте ведущую сеть в компенсатор
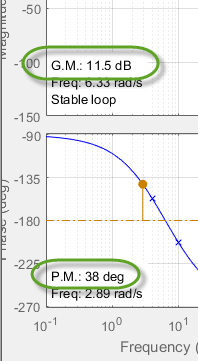
В Bode Editor рассмотрите поле усиления и поле фазы для текущего проекта компенсатора. Проект требует поля усиления, больше, чем 20 дБ и поля фазы, больше, чем 40 градусов. Текущий проект не удовлетворяет ни одно из этих требований.
Чтобы увеличить запасы устойчивости, добавьте ведущую сеть в компенсатор.
В Bode Editor щелкните правой кнопкой и выберите Add Pole/Zero> Lead.
Чтобы задать местоположение ведущего сетевого полюса, нажмите на ответ значения. Приложение добавляет действительный полюс (красный X) и действительный нуль (красный O) к компенсатору и к графику Bode Editor.
В Bode Editor перетащите полюс и нуль, чтобы изменить их местоположения. Когда вы перетаскиваете их, обновления приложения полюс/нулевые значения, и обновляет графики ответа.
Чтобы уменьшить значение полюса или обнулить, перетащите его влево. Поскольку полюс и нуль находятся на отрицательной вещественной оси, перетаскивание их к левому двигает их поближе к источнику в комплексной плоскости.
Когда вы перетаскиваете полюс или нуль, отображения приложения новое значение в строке состояния, на правой стороне.

Как первоначальная оценка, перетащите нуль к местоположению вокруг -7 и полюса к местоположению вокруг -11.
Поле фазы соответствует конструктивным требованиям; однако, поле усиления является все еще слишком низким.
Отредактируйте ведущий сетевой полюс и нуль
Чтобы улучшать производительность контроллера, настройте ведущие сетевые параметры.
В диалоговом окне Compensator Editor, в разделе Dynamics, кликают по строке Lead.
В разделе Edit Selected Dynamics, в текстовом поле Real Zero, задают местоположение -4.3 и нажимают Enter. Это значение около самого медленного (крайнего левого) полюса объекта двигателя постоянного тока.
В текстовом поле Real Pole задайте значение -28 и нажмите Enter.
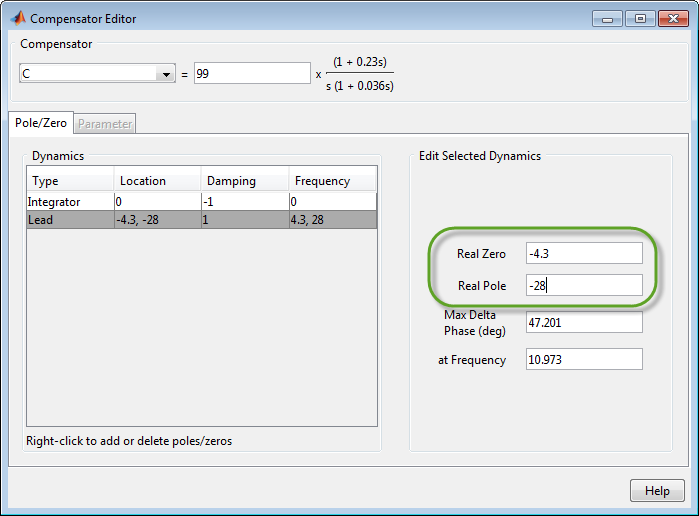
Когда вы изменяете вывод сетевые параметры, Compensator и обновление графиков ответа автоматически.
В приложении, в Bode Editor, поле усиления 20.5 только соответствует конструктивным требованиям.
Чтобы добавить робастность в систему, в диалоговом окне Compensator Editor, уменьшают усиление компенсатора к 84.5 и нажимают Enter. Поле усиления увеличивается до 21.8 и обновления графиков ответа.
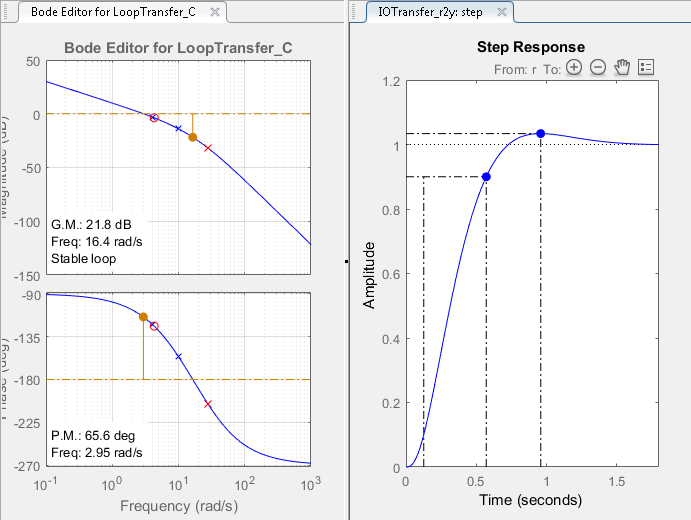
В Control System Designer, в графиках ответа, сравнивают производительность системы с конструктивными требованиями. Характеристики производительности системы:
Время нарастания составляет 0,445 секунды.
Установившаяся ошибка является нулем.
Перерегулирование составляет 3,39%.
Поле усиления составляет 21,8 дБ.
Поле фазы является 65,6 градусами.
Отклик системы соответствует всем конструктивным требованиям.
Control System Designer | bodeplot
