Компенсируйте CIC-фильтр с помощью КИХ-интерполятора
Фильтрация/Фильтр Проектов
dspfdesign
Блок CIC Compensation Interpolator использует КИХ многофазный интерполятор в качестве фильтра компенсации. Интерполяторы компенсации CIC являются многоскоростными КИХ-фильтрами, которые могут быть расположены каскадом с интерполяторами CIC, чтобы смягчить недостатки CIC-фильтров.
Фильтры интерполяции CIC используются в областях, которые требуют высокой интерполяции. Эти фильтры популярны в ASICs и FPGAs, поскольку у них нет множителей. CIC-фильтры имеют два недостатка:
CIC-фильтры имеют ответ значения, который вызывает свисание в области полосы пропускания. Этот ответ значения:
M Дифференциальная задержка
n Количество этапов
ω — Нормированная угловая частота
CIC-фильтры имеют широкую область перехода.
Фильтры интерполятора компенсации имеют инверсию sinc ответ полосы пропускания, чтобы исправить для свисания CIC, и у них есть узкая ширина перехода.
Этот блок приносит возможности Системы dsp.CICCompensationInterpolator object™ к среде Simulink®.
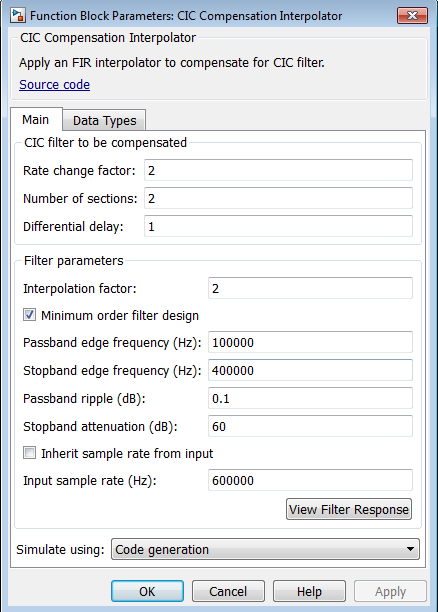
Фактор изменения уровня для CIC-фильтра, который будет компенсирован, заданный как положительное скалярное целое число. Значением по умолчанию является 2.
Количество интегратора и разделы расчески CIC-фильтра, который будет компенсирован, заданный как положительное скалярное целое число. Значением по умолчанию является 2.
Задержите значение, используемое в каждом из разделов расчески CIC-фильтра, который будет компенсирован, задан как положительное скалярное целое число. Значением по умолчанию является 1.
Коэффициент интерполяции компенсатора, заданного как положительное скалярное целое число. Значением по умолчанию является 2.
Когда вы устанавливаете этот флажок, фильтры блочных конструкций с минимальным заказом, который соответствует спецификациям для частоты полосы пропускания, частоты полосы задерживания, пульсации полосы пропускания и затухания полосы задерживания. Когда вы снимаете этот флажок, фильтры блочных конструкций с порядком, который вы задаете в Filter order.
По умолчанию этот флажок устанавливается.
Порядок фильтра компенсации, заданного как положительное скалярное целое число. Значением по умолчанию является 12.
Частота ребра полосы пропускания фильтра компенсации, заданного как действительная положительная скалярная величина в Гц. Passband edge frequency (Hz) должен быть меньше, чем Fs/2, где Fs является выходной частотой дискретизации. Значением по умолчанию является 100000.
Частота ребра полосы задерживания фильтра компенсации, заданного как действительная положительная скалярная величина в герц. Stopband edge frequency (Hz) должен быть меньше, чем Fs/2, где Fs является выходной частотой дискретизации. Значением по умолчанию является 400000.
Пульсация полосы пропускания фильтра компенсации, заданного как действительная положительная скалярная величина в дБ. Значением по умолчанию является 0.1.
Затухание полосы задерживания фильтра компенсации, заданного как действительная положительная скалярная величина в дБ. Значением по умолчанию является 60.
Когда вы устанавливаете этот флажок, блок наследовал свою частоту дискретизации от входного сигнала. Когда вы снимаете этот флажок, необходимо задать частоту дискретизации в Input sample rate (Hz).
Введите частоту дискретизации, заданную как скаляр в Гц. Значением по умолчанию является 600000.
Открывает Инструмент Визуализации Фильтра FVTool и отображает значение/фазовый отклик Интерполятора Компенсации CIC. Ответ основан на параметрах диалогового окна блока. Изменения, внесенные в эти параметры, обновляют FVTool.
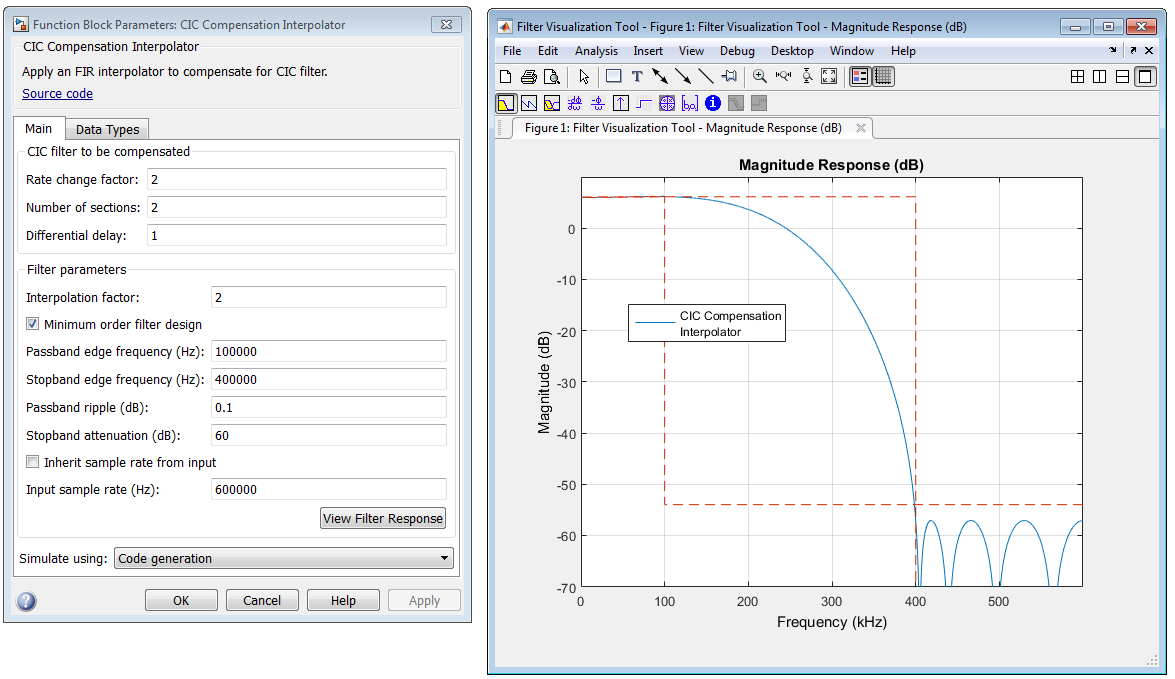
Чтобы обновить ответ значения, в то время как FVTool запускается, измените параметры диалогового окна и нажмите Apply.
Тип симуляции, чтобы запуститься. Можно установить этот параметр на:
Code generation (значение по умолчанию)
Моделируйте модель с помощью сгенерированного кода C. В первый раз, когда вы запускаете симуляцию, Simulink генерирует код С для блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска, но обеспечивает более быструю скорость симуляции, чем Interpreted execution.
Interpreted execution
Моделируйте модель с помощью интерпретатора MATLAB®. Эта опция сокращает время запуска, но имеет более медленную скорость симуляции, чем Code generation.
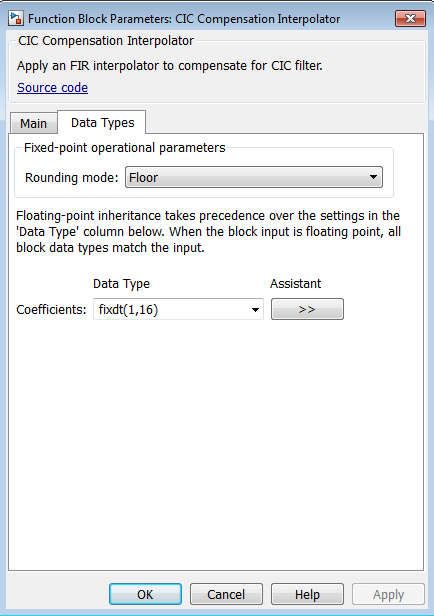
Округление метода для выходных операций фиксированной точки. Методами округления является Ceiling, Convergent, Floor, Nearest, Round, Simplest и Zero. Значением по умолчанию является Floor.
Тип данных с фиксированной точкой коэффициентов, заданных как одно из следующего:
fixdt(1,16) (значение по умолчанию) — Тип данных с фиксированной точкой со знаком размера слова 16, с масштабированием двоичной точки. Блок определяет дробную длину автоматически от содействующих значений таким способом, которым коэффициенты занимают максимальную представимую область значений без переполнения.
fixdt(1,16,0) — Тип данных с фиксированной точкой со знаком размера слова 16, фракционируйте длину 0. Можно изменить дробную длину на любое другое целочисленное значение.
<data type expression> — Задайте содействующий тип данных при помощи выражения, которое оценивает к объекту типа данных, например, числовой тип (fixdt ([ ], 16, 15), чтобы задать содействующий тип данных. Задайте режим знака этого типа данных как [ ] или верный.
Refresh Data Type — Обновления к типу данных по умолчанию.
Нажмите кнопку Show data type assistant![]() , чтобы отобразить ассистент типа данных, который помогает вам установить входной параметр этапа.
, чтобы отобразить ассистент типа данных, который помогает вам установить входной параметр этапа.
Смотрите Задают Типы данных Используя Ассистент Типа данных (Simulink) для получения дополнительной информации.
| Порт | Поддерживаемые типы данных |
|---|---|
Входной параметр |
|
Вывод |
|
dsp.CICCompensationInterpolator | DSP System Toolbox |
| Компенсация CIC Decimator | DSP System Toolbox |
Ответом CIC-фильтра дают:
R, D и N являются фактором изменения уровня, дифференциальной задержкой и количеством разделов CIC-фильтра, соответственно.
После десятикратного уменьшения cic ответ имеет form:okay
Нормированная версия этого последнего ответа является той, которую должен компенсировать компенсатор CIC. Следовательно, ответ полосы пропускания компенсатора CIC должен принять следующую форму:
где ω p является частотой полосы пропускания фильтра компенсации CIC.
Заметьте что, когда ω/2R ≪ π, предыдущее уравнение для Hciccomp (ω) может быть упрощено с помощью факта, которые sin (x) ≅ x:
Это предыдущее уравнение является инверсией sinc приближение к истинному обратному ответу полосы пропускания CIC-фильтра.
