Адаптивная фильтрация включает изменение параметров фильтра (коэффициенты) в зависимости от времени, чтобы адаптироваться к изменяющимся характеристикам сигнала. За прошлые три десятилетия цифровые сигнальные процессоры сделали большие усовершенствования в увеличивающейся скорости и сложности и потреблении энергии сокращения. В результате адаптивные алгоритмы фильтрации в реальном времени быстро становятся практичными и важными для будущего коммуникаций, оба соединенные проводом и беспроводная связь.
Для более подробной информации об адаптивных фильтрах и адаптивной теории фильтра, обратитесь к книгам, перечисленным в [1] и [2].
Этот раздел представляет краткое описание того, как адаптивные фильтры работают и некоторые приложения, где они могут быть полезными.
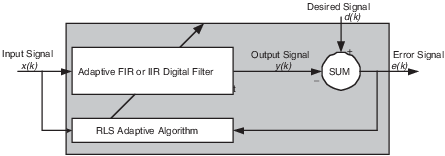
Адаптивные фильтры сам учатся. В то время как сигнал в фильтр продолжается, адаптивные коэффициенты фильтра настраивают себя, чтобы достигнуть желаемого результата, такого как идентификация неизвестного фильтра или отмена шума во входном сигнале. В фигуре ниже, теневое поле представляет адаптивный фильтр, включая адаптивный фильтр и адаптивный алгоритм рекурсивных наименьших квадратов (RLS).
Блок-схема, которая задает входные параметры и Вывод типичного адаптивного фильтра RLS
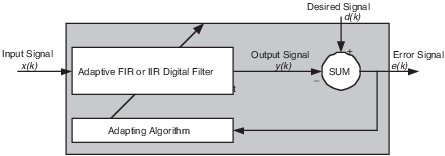
Следующая фигура предоставляет общей адаптивной настройке фильтра вводы и выводы.
Блок-схема, задающая общие адаптивные вводы и выводы алгоритма фильтра
Программное обеспечение DSP System Toolbox™ включает адаптивные фильтры широкого диапазона форм, все из которых могут стоить для определенных потребностей. Некоторые из общих единиц:
Адаптивные фильтры на основе методов наименьшее количество средних квадратичных (LMS), таких как dsp.LMSFilter и dsp.FilteredXLMSFilter
Адаптивные фильтры на основе методов рекурсивных наименьших квадратов (RLS), включая данные знака, ошибку знака и знак знака. Смотрите dsp.RLSFilter.
Адаптивные фильтры на основе фильтров решетки. Смотрите dsp.AdaptiveLatticeFilter.
Адаптивные фильтры, которые действуют в частотном диапазоне. Смотрите dsp.FrequencyDomainAdaptiveFilter.
Адаптивный фильтр разрабатывает себя на основе характеристик входного сигнала к фильтру и сигналу, который представляет желаемое поведение фильтра на его входе.
Разработка фильтра не запрашивает никакую другую информацию частотной характеристики или спецификацию. Чтобы задать самообучающийся процесс использование фильтра, вы выбираете адаптивный алгоритм, используемый, чтобы уменьшать ошибку между выходным сигналом y (k) и желаемым сигналом d (k).
Когда критерий производительности LMS для e (k) достиг своего минимального значения через итерации адаптирующегося алгоритма, адаптивный фильтр закончен, и его коэффициенты сходились к решению. Теперь вывод от адаптивного фильтра совпадает тесно с желаемым сигналом d (k). Когда вы изменяете характеристики входных данных, иногда названные средой фильтра, фильтр адаптируется к новой среде путем генерации нового набора коэффициентов для новых данных. Заметьте, что, когда e (k) переходит к нулю и остается там, вы достигаете совершенной адаптации, идеального результата, но вряд ли в реальном мире.
Адаптивные функции filter в этом тулбоксе реализуют теневой фрагмент фигур, заменяя адаптивный алгоритм на соответствующий метод. Чтобы использовать одну из функций, вы обеспечиваете входной сигнал или сигналы и начальные значения для фильтра.
Адаптивные Фильтры в DSP System Toolbox Software предлагают детали о доступных алгоритмах и входные параметры, требуемые использовать их в MATLAB®.
Выбор адаптивного фильтра, который лучше всего удовлетворяет ваши потребности, требует внимательного рассмотрения. Исчерпывающее обсуждение критериев выбора вашего подхода выходит за рамки этого Руководства пользователя. Однако несколько инструкций могут помочь вам сделать свой выбор.
Два основных фактора структурируют решение — как вы планируете использовать фильтр и алгоритм фильтра, чтобы использовать.
Когда вы начинаете разрабатывать адаптивный фильтр для своих потребностей, скорее всего, первоочередная задача состоит в том, является ли использование адаптивного фильтра конкурентоспособным подходом к решению ваших потребностей фильтрации. Обычно много областей определяют пригодность адаптивных фильтров (эти области характерны для большинства приложений фильтрации и обработки сигналов). Четыре таких области
Отфильтруйте непротиворечивость — ваша производительность фильтра ухудшается, когда коэффициенты фильтра изменяются немного в результате квантования, или вы переключаетесь на вычисления с фиксированной точкой? Будет чрезмерный шум в сигнале повреждать производительность своего фильтра?
Отфильтруйте производительность — ваш адаптивный фильтр обеспечивает достаточную идентификационную точность или точность, или фильтр обеспечивает достаточную дискриминацию сигнала или подавление помех, чтобы удовлетворить ваши требования?
Инструменты Tools — Do существуют, которые делают ваш процесс разработки фильтра легче? Лучшие инструменты могут сделать его практичным, чтобы использовать более комплексные адаптивные алгоритмы.
Требования DSP — ваш фильтр может выполнить свое задание в рамках ограничений вашего приложения? Ваш процессор имеет достаточную память, пропускную способность, и время, чтобы использовать ваш предложенный адаптивный подход фильтрации? Можете вы обменивать память на пропускную способность: используйте больше памяти, чтобы уменьшать требования пропускной способности или использовать более быстрый сигнальный процессор?
Из предыдущих факторов, характеризуя непротиворечивость фильтра или робастность может быть самым трудным.
Симуляции в программном обеспечении DSP System Toolbox предлагают хороший первый шаг в разработке и изучении этих проблем. Фильтры LMS-алгоритма обеспечивают и относительно прямые фильтры, чтобы реализовать и достаточно мощный инструмент для оценки, может ли адаптивная фильтрация быть полезна для вашей проблемы.
Кроме того, начиная с LMS подход может сформировать твердую базовую линию, с которой можно изучить и сравнить более комплексные адаптивные фильтры, доступные в тулбоксе. Наконец, ваш процесс разработки, в некоторое время, должен протестировать ваш алгоритм и адаптивный фильтр с действительными данными. Для того, чтобы действительно протестировать значение вашей работы нет никакой замены для фактических данных.
Одно общее адаптивное приложение фильтра должно использовать адаптивные фильтры, чтобы идентифицировать неизвестную систему, такую как ответ неизвестного коммуникационного канала или частотная характеристика аудитории, выбрать довольно расходящиеся приложения. Другие приложения включают отмену эха и идентификацию канала.
В фигуре неизвестная система помещается параллельно с адаптивным фильтром. Это размещение представляет только одну из многих возможных структур. Заштрихованная область содержит адаптивную систему фильтра.
Используя адаптивный фильтр, чтобы идентифицировать неизвестную систему
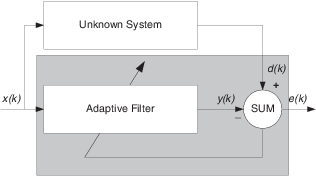
Безусловно, когда e (k) является очень маленьким, адаптивный ответ фильтра близко к ответу неизвестной системы. В этом случае тот же вход питает и адаптивный фильтр и неизвестное. Если, например, неизвестная система является модемом, вход часто представляет белый шум и является частью звука, вы получаете известие от своего модема, когда вы входите в систему своего поставщика интернет-услуг.
Путем размещения неизвестной системы последовательно с адаптивным фильтром фильтр адаптируется, чтобы стать инверсией неизвестной системы, когда e (k) становится очень маленьким. Как показано в фигуре процесс требует, чтобы задержка, вставленная в желаемый путь к сигналу d (k), сохранила данные при суммировании синхронизируемыми. Добавление задержки сохраняет систему причинной.
Определение обратного ответа на неизвестную систему
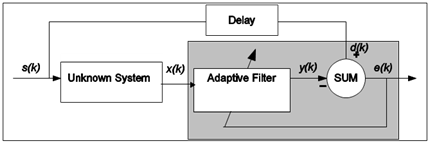
Включая задержку, чтобы составлять задержку, вызванную неизвестной системой, предотвращает это условие.
Простые телефонные сети (POTS) обычно используют обратную систему идентификации, чтобы компенсировать медный носитель передачи. Когда вы отправляете данные или речь по телефонным линиям, медные провода ведут себя как фильтр, имея ответ, который прокручивается прочь на более высоких частотах (или скорости передачи данных) и наличие других аномалий также.
Добавление адаптивного фильтра, который имеет ответ, который является инверсией проводного ответа и конфигурирования фильтра, чтобы адаптироваться в режиме реального времени, позволяет фильтру компенсировать спад и аномалии, увеличивая доступную область значений частотного вывода и скорость передачи данных для телефонной сети.
В подавлении помех адаптивные фильтры позволяют вам удалить шум из сигнала в режиме реального времени. Здесь, желаемый сигнал, тот, чтобы вымыться, комбинирует шум и желаемую информацию. Чтобы удалить шум, накормите сигналом n' (k) адаптивный фильтр, который коррелируется к шуму, который будет удален из желаемого сигнала.
Используя адаптивный фильтр, чтобы удалить шум из неизвестной системы
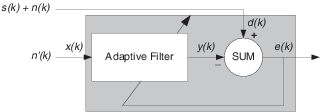
Пока входной шум к фильтру остается коррелированым к нежелательному шуму, сопровождающему желаемый сигнал, адаптивный фильтр настраивает свои коэффициенты, чтобы уменьшать значение различия между y (k) и d (k), удаляя шум и приводя к чистому сигналу в e (k). Заметьте, что в этом приложении, сигнал ошибки на самом деле сходится к сигналу входных данных, вместо того, чтобы сходиться, чтобы обнулить.
Предсказание сигналов требует, чтобы вы сделали некоторые ключевые предположения. Примите, что сигнал является или устойчивым или медленно переменным в зависимости от времени и периодическим в зависимости от времени также.
Предсказание будущих значений периодического сигнала
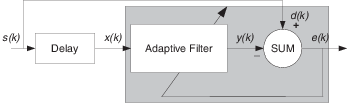
Принимая эти предположения, адаптивный фильтр должен предсказать будущие значения желаемого сигнала на основе прошлых значений. Когда s (k) является периодическим, и фильтр достаточно длинен, чтобы помнить, что предыдущие значения, эта структура с задержкой входного сигнала, могут выполнить прогноз. Вы можете использовать эту структуру, чтобы удалить периодический сигнал из стохастических шумовых сигналов.
Наконец, заметьте, что большинство систем интереса содержит элементы больше чем одной из четырех адаптивных структур фильтра. Тщательно рассмотрение действительной структуры может потребоваться, чтобы определять то, к чему адаптируется адаптивный фильтр.
Кроме того, для ясности в фигурах не появляются аналого-цифровое (A/D) и цифро-аналоговые компоненты (D/A). Поскольку адаптивные фильтры приняты, чтобы быть цифровыми по своей природе, и многие проблемы производят аналоговые данные, преобразовывание входных сигналов к и от аналоговой области, вероятно, необходимо.
[1] Hayes, Монсон Х., статистическая цифровая обработка сигналов и Modeling, John Wiley & Sons, 1996, 493–552.
[2] Haykin, Саймон, адаптивная теория фильтра, Prentice-Hall, Inc., 1996
