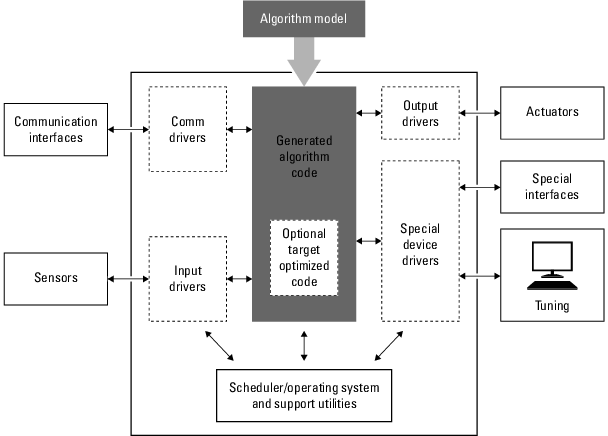
Один подход к проверке компонента программного обеспечения должен встроить компонент в полную программную систему, которая может выполниться в режиме реального времени в целевом окружении. Полная программная система включает:
Алгоритм для компонента программного обеспечения
Алгоритмы планирования
Вызовы драйверов для специфичных для платы устройств
Этот один подход сборки является более трудоемким, чтобы настроить, но облегчает получать законченное приложение, запускающееся в целевом окружении.
Следующие данные показывают код, сгенерированный для алгоритма, встраиваемого в исполняемый файл полной системы для целевого окружения.
Рабочий процесс для тестирования компонентного программного обеспечения как часть полного целевого окружения в реальном времени:
Разработайте модель компонента и сгенерируйте исходный код для производства.
Для получения информации о создании в системе планирования и поддержке системы реального времени, см.:
Основанное на времени Планирование и Генерация кода (Simulink Coder) и Моделирование для Многозадачного Выполнения (Simulink Coder). Для примера откройте rtwdemos и перейдите к папке Multirate Support.
Асинхронные События (Simulink Coder) и пример rtwdemo_async
Разверните сгенерированные программы независимого исполняемого файла на целевом компьютере
Рабочие процессы для AUTOSAR (AUTOSAR Blockset) и пример Разрабатывают Модель, которая Выполняет Стандарт AUTOSAR.
Оптимизируйте сгенерированный код для определенной среды выполнения, пользуясь специализированными функциональными библиотеками. Для получения дополнительной информации смотрите то, Что Замена Кода?, Что такое Заменяющая Индивидуальная настройка Кода?, и Оптимизируйте Сгенерированный код Путем Разработки и пользования Заменяющими Библиотеками Кода - Simulink®.
Настройте обработку сборки генерации кода сообщения, чтобы разместить сторонние программы и процессы, как требуется. Смотрите Настраивают Обработку Сборки Постгенерации кода (Simulink Coder) и пример rtwdemo_buildinfo.
Интегрируйте внешний код, например, для драйверов устройств и планировщика, со сгенерированным C или Кодом С++ для вашей модели компонента. Для получения дополнительной информации смотрите S-функции и Генерацию кода (Simulink Coder). Для более определенных ссылок в зависимости от ваших целей верификации см. следующую таблицу.
| Для... | Смотрите... |
|---|---|
| Интеграция кода ANSI® C/C ++ | Интегрируйте Функции C Используя Legacy Code Tool (Simulink). Кроме того, открытый rtwdemos и перешел к папке Custom Code. |
| Смешанная интеграция кода |
|
Моделируйте интегрированную модель.
Сгенерируйте код для интегрированной модели.
Соединитесь с интерфейсами данных для структур данных сгенерированного кода C. Смотрите обмениваются Данными Между Сгенерированным и Внешним Кодом Используя API C (Simulink Coder) и Экспортом Файл ASAP2 для Измерения Данных и Калибровки (Simulink Coder). Также смотрите примеры rtwdemo_capi и rtwdemo_asap2.
Настройте и управляйте процессом сборки, как требуется. Смотрите Настраивают Обработку Сборки Постгенерации кода (Simulink Coder) и пример rtwdemo_buildinfo.
Создайте zip-файл, который содержит файлы сгенерированного кода, статические файлы и зависимые данные, чтобы создать сгенерированный код в среде кроме вашего хоста - компьютера. Смотрите Перемещают Код к Другой Среде разработки (Simulink Coder) и пример rtwdemo_buildinfo.
