Меркаторская навигационная фиксация
[latfix,lonfix] = navfix(lat,long,az)
[latfix,lonfix] = navfix(lat,long,range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype)
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon)
[latfix,lonfix] = navfix(lat,long,az) возвращает точки пересечения локсодром проведенная параллель к наблюдаемым подшипникам, az, ориентиров, расположенных в точках lat и long и проходящий через эти точки. Один перенос требуется для каждого ориентира. Каждое возможное соединение n ориентиров генерирует одно пересечение, таким образом, общее количество получившихся точек пересечения является комбинаторным n, выбирают 2. Время вычисления поэтому растет быстро с n.
[latfix,lonfix] = navfix(lat,long,range,casetype) возвращает точки пересечения Меркаторских кругов проекции с радиусами, заданными range, сосредоточенным на ориентирах, расположенных в точках lat и long. Одно значение области значений требуется для каждого ориентира. Каждое возможное соединение n ориентиров генерирует до двух пересечений (круги могут пересечься дважды), таким образом, общее количество получившихся точек пересечения комбинаторные 2 раза (n, выбирают 2). Время вычисления поэтому растет быстро с n. В этом случае переменная casetype является вектором 0 s тот же размер как переменная range.
[latfix,lonfix] = navfix(lat,long,az_range,casetype) области значений объединений и подшипники. Для каждого элемента casetype, равного 1, соответствующий элемент az_range представляет азимут связанному ориентиру. Где casetype является 0, az_range является областью значений.
[latfix,lonfix] = navfix(lat,long,az_range,casetype,drlat,drlon) возвращает для каждого возможного соединения ориентиров только пересечение, которое находится самое близкое к положению точного расчета, обозначенному drlat и drlon. Когда этот синтаксис используется, строки переноса всех включенных ориентиров или дуги области значений должны пересечься. Если какое-либо возможное соединение перестало работать, предупреждение, что No Fix отображен.
Это - навигационная функция. Это принимает, что все широты и долготы в градусах, и все расстояния находятся в морских милях. В навигации макетирование является практикой фиксации положения на основе наблюдаемого переноса и областей значений к фиксированным ориентирам (точки земли, маяков, дымовых труб, и т.д.) от судна навигатора. В соответствии с навигационной практикой, подшипники обработаны как локсодромы, и области значений обработаны как радиусы кругов на Меркаторской проекции.
На практике по крайней мере три азимута (подшипники) и/или области значений требуются для применимой фиксации. Получившиеся пересечения вряд ли совпадут точно. Обратитесь к Навигации в Руководстве пользователя Mapping Toolbox для большего количества полного описания использования этой функции.
Для полностью проиллюстрированного примера приложения этой функции обратитесь к разделу Navigation в Руководстве пользователя Mapping Toolbox.
Предположите, что у вас есть два ориентира, в (15ºN, 30.4ºW) и (14.8ºN, 30.1ºW). У вас есть визуальный перенос к первому из 280º и к второму из 160º. Кроме того, у вас есть область значений к второму из 12 нм. Найдите точки пересечения:
[latfix,lonfix] = navfix([15 14.8 14.8],[-30.4 -30.1 -30.1],...
[280 160 12],[1 1 0])
latfix =
14.9591 NaN
14.9680 14.9208
14.9879 NaN
lonfix =
-30.1599 NaN
-30.2121 -29.9352
-30.1708 NaNВот рисунок геометрии:
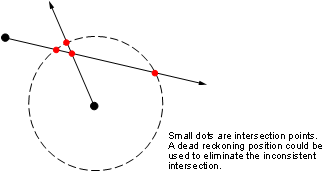
Традиционный графический вывод и функция navfix ограничиваются относительно короткими расстояниями. Визуальные подшипники являются на самом деле большими круговыми азимутами, не локсодромами, и дуги области значений являются на самом деле дугами маленьких кругов, не плоских кругов, построенных на графике. Однако механическая простота процесса и практические пределы визуальных областей значений переноса и навигационных радарных областей значений (~30 нм) делают это ограничение спорным на практике. Ошибка, внесенная из-за этих предположений, является крохотной в той шкале.
Выходные параметры этой функции являются матрицами, обеспечивающими местоположения пересечений для всех возможных соединений вводимых строк n дуг области значений и переноса. Эти матрицы поэтому имеют n-choose-2 строки. Для получения возможности двух пересечений на комбинацию эти матрицы имеют два столбца. Каждый раз, когда существует меньше чем два пересечения для той комбинации, один или два NaNs возвращены в той строке.
Когда положение точного расчета включено, эти матрицы являются вектор-столбцами.
crossfix | dreckon | gcwaypts | gcxgc | gcxsc | legs | polyxpoly | rhxrh | scxsc | track
