Методические рекомендации включают спецификацию масштабных коэффициентов для каждой переменной ввода и вывода объекта, которая особенно важна, когда определенные переменные имеют намного большие или меньшие значения, чем другие.
Масштабный коэффициент должен равняться (или аппроксимированный) промежутку переменной. Span является различием между своим максимальным и минимальным значением в технических модулях, то есть, единица измерения, заданная в модели объекта управления. Внутренне, MPC делит каждый сигнал ввода и вывода объекта на свой масштабный коэффициент, чтобы сгенерировать безразмерные сигналы.
Потенциальные выгоды масштабирования следующие:
Настраивающие веса MPC по умолчанию работают лучше всего, когда все сигналы имеют единицу порядка. Соответствующие масштабные коэффициенты делают веса по умолчанию хорошей отправной точкой для контроллера, настраивающегося и улучшения.
При выборе весов функции стоимости можно фокусироваться на относительном приоритете каждого термина, а не комбинации приоритета и предупредить о шкале.
Улучшенное числовое создание условий. Когда значения масштабируются, ошибки округления оказывают меньше влияния на вычисления.
Если вы настроили контроллер, изменение масштабного коэффициента, вероятно, будет влиять на производительность, и контроллеру, возможно, понадобится перенастройка. Лучшая практика состоит в том, чтобы установить масштабные коэффициенты в начале проектирования контроллера и содержать их постоянный после этого.
Чтобы идентифицировать масштабные коэффициенты, оцените промежуток каждой переменной ввода и вывода объекта в технических модулях.
Если сигнал знал границы, используйте различие между верхним и нижним пределом.
Если вы не знаете границы сигнала, рассмотрите рабочие симуляции модели объекта управления разомкнутого цикла. Можно отличаться входные параметры в их вероятных областях значений и записать промежутки выходного сигнала.
Если вы понятия не имеете, используйте масштабный коэффициент по умолчанию (=1).
Можно задать масштабные коэффициенты в командной строке и использовании приложения MPC Designer.
Если вы установили масштабные коэффициенты и начали настраивать производительность контроллера, содержать постоянные масштабные коэффициенты.
После того, как вы создаете контроллер MPC объектное использование команды mpc, устанавливаете свойство масштабного коэффициента для каждой переменной ввода и вывода объекта.
Например, следующие команды создают случайный объект, задают типы сигнала и задают масштабный коэффициент для каждого сигнала.
% Random plant for illustrative purposes: 5 inputs, 3 outputs Plant = drss(4,3,5); Plant.InputName = {'MV1','UD1','MV2','UD2','MD'}; Plant.OutputName = {'UO','MO1','MO2'}; % Example signal spans Uspan = [2, 20, 0.1, 5, 2000]; Yspan = [0.01, 400, 75]; % Example signal type specifications iMV = [1 3]; iMD = 5; iUD = [2 4]; iDV = [iMD,iUD]; Plant = setmpcsignals(Plant,'MV',iMV,'MD',iMD,'UD',iUD, ... 'MO',[2 3],'UO',1); Plant.D(:,iMV) = 0; % MPC requires zero direct MV feed-through % Controller object creation. Ts = 0.3 for illustration. MPCobj = mpc(Plant,0.3); % Override default scale factors using specified spans for i = 1:2 MPCobj.MV(i).ScaleFactor = Uspan(iMV(i)); end % NOTE: DV sequence is MD followed by UD for i = 1:3 MPCobj.DV(i).ScaleFactor = Uspan(iDV(i)); end for i = 1:3 MPCobj.OV(i).ScaleFactor = Yspan(i); end
После открытия MPC Designer и определения начальной структуры MPC, на вкладке MPC Designer, нажимают I/O Attributes
![]() .
.
В диалоговом окне Input and Output Channel Specifications задайте Scale Factor для каждого сигнала ввода и вывода.
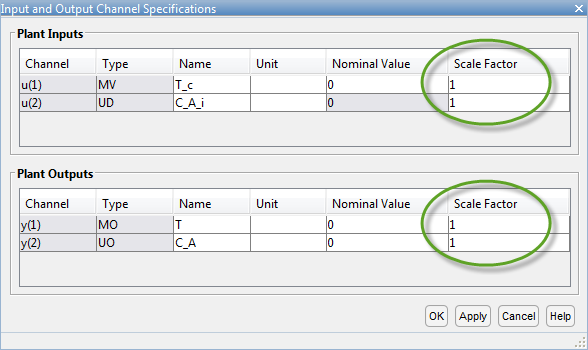
Чтобы обновить настройки контроллера, нажмите OK.
