Глобальная система координат описывает арену, на которой происходит ваша симуляция радара или гидролокатора. На этой арене можно поместить радар или передатчики гидролокатора и получатели и цели. Эти объекты могут быть или стационарными или движущимися. Вы задаете местоположение и движение этих объектов в глобальных координатах.
Можно смоделировать движение всех объектов с помощью Системы phased.Platform object™. Этот Системный объект вычисляет положение и скорость объектов с помощью моделей постоянного ускорения или постоянной скорости.
Можно смоделировать сигналы, которые распространяют между объектами в сценарии. Пути к лучу, которые соединяют передатчики, цели и получатели, заданы в глобальных координатах. Можно распространить сигналы с помощью этих Системных объектов: phased.FreeSpace, phased.WidebandFreeSpace, phased.LOSChannel или phased.WidebandLOSChannel. Если вы моделируете 2D луч многопутевое распространение с помощью Системного объекта phased.TwoRayChannel, граничная плоскость установлена в z = 0 в глобальной системе координат.
Когда сигналы взаимодействуют с датчиками или целями, взаимодействие почти всегда задается как функция датчика или целевых локальных координат. Системы локальной координаты фиксируются к антеннам и микрофонам, поэтапным массивам и целям. Они перемещаются и вращаются с объектом. Локальные координаты обычно адаптируются к форме и симметрии объекта.
Поскольку сигналы распространяют в глобальной системе координат, необходимо смочь преобразовать локальные координаты в глобальные координаты. Вы делаете это путем построения 3х3 ортонормированной матрицы осей координат. Столбцы матрицы представляют три ортогональных вектора направления локальных координат, выраженных в глобальной системе координат. Оси координат системы локальной координаты должны быть ортонормированы, но они не должны быть параллельны осям глобальной координаты.
Когда необходимо вычислить область значений и углы падения сигнала, можно использовать функцию rangeangle. Когда вы вызываете эту функцию с источником и позицией получателя, выраженной в глобальных координатах, функция возвращает область значений и углы падения, азимут и повышение, относительно осей глобальной системы. Однако, когда вы передаете матрицу ориентации в качестве дополнительного аргумента, азимут и повышение теперь заданы относительно системы локальной координаты.
Вы используете локальные координаты, чтобы задать
местоположение и ориентация антенны или элементы микрофона массива. Диаграмма направленности антенной решетки зависит от угла прибытия или эмиссии излучения относительно локальных координат массивов.
отраженная энергия от цели является функцией инцидентных и отражательных углов относительно целевых осей локальной координаты.
Два примера систем локальной координаты
самолет может иметь систему локальной координаты с x - осью, выровненной вдоль оси фюзеляжа тела и y - ось, указывающая вдоль крыла порта. Выберите z - ось, чтобы сформировать правую систему координат.
смонтированному автомобилем плоскому поэтапному массиву можно было адаптировать систему локальной координаты к массиву. x - ось системы координат может указать вдоль вектора нормали массивов.
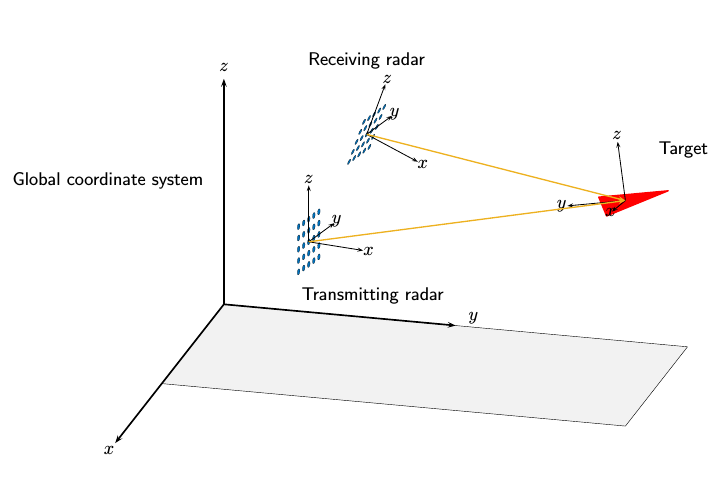
Следующая фигура иллюстрирует отношение локальных и глобальных систем координат в бистатическом радарном сценарии. Толстые сплошные линии представляют оси координат глобальной системы координат. Существует два поэтапных массива: универсальный прямоугольный массив (URA) передачи 5 на 5 и получение 5 на 5 URA. Каждый из поэтапных массивов несет свою собственную систему локальной координаты. Цель, обозначенная Красной стрелой, также несет систему локальной координаты.
Следующие несколько разделов рассматривают системы локальной координаты, используемые массивами.
Положения элементов любого массива Phased Array System Toolbox™ всегда задаются в системе локальной координаты. Когда вы используете любой из Системных объектов, которые создают универсальные массивы, положения элемента массива заданы автоматически относительно предопределенной системы локальной координаты. Массивы, для которых это свойство хранения phased.ULA, phased.URA, phased.UCA, phased.HeterogeneousULA и Системные объекты phased.HeterogeneousURA. Для этих Системных объектов массивы описаны с помощью нескольких параметров, таких как интервал элемента и число элементов. Положения элементов затем заданы относительно источника массивов, расположенного в (0,0,0), который является геометрическим центром массива. Геометрический центр является хорошим приближением к центру фазы массивов. Центр фазы массива является точкой, от которой исходящие волны, кажется, выделяются, когда наблюдается в далеком поле. Например, для ULA с нечетным числом элементов, элементы расположены на расстояниях (-2d, -d, 0, d, 2d) вдоль оси массивов.
Существуют Системные объекты массивов, для которых необходимо явным образом задать координаты элемента. Можно использовать эти объекты для создания произвольных форм массивов. Эти объекты являются Системными объектами phased.HeterogeneousConformalArray и phased.ConformalArray. Для этих массивов центр фазы массива не должен совпадать с источником массивов или геометрическим центром.
Направления Опорного направления элемента. В дополнение к положениям элемента необходимо задать ориентации элемента, то есть, направления, в которых указывают элементы. Некоторые элементы очень направлены — большинство их излученных энергетических потоков в одном направлении, названном основной осью ответа (MRA). Другие являются всенаправленными. Ориентация элемента является указывающим направлением MRA. Вы задаете ориентацию элемента с помощью азимута и повышения в системе локальной координаты массивов. Направление, что антенна или микрофон поверхности MRA при передаче или получении сигнала также называются направление взгляда или опорное направление. Для универсальных массивов все направления опорного направления всех элементов определяются параметрами массива. Для конформных массивов вы задаете направление опорного направления каждого элемента независимо.
Источник массивов и Центр Фазы. Универсальная линейная матрица (ULA) является массивом антенны или элементов микрофона, которые являются equidistantly, расположенным с интервалами вдоль прямой линии. В Phased Array System Toolbox Системный объект phased.ULA создает массив ULA. Геометрия ориентации ULA ее элементов определяется тремя параметрами: число элементов, расстояние между элементами и свойство ArrayAxis. Для ULA система локальной координаты адаптируется к массиву — элементы являются автоматически присвоенными положениями в системе локальной координаты.
Положения элементов в массиве определяются свойством ArrayAxis, которое может принять значения 'x', 'y' или 'z'. Свойство оси массивов определяет ось, на которой заданы все элементы. Например, когда свойство ArrayAxis установлено в 'x', элементы массива простираются вдоль x - ось. Элементы расположены симметрично относительно источника. Поэтому геометрический центр массива находится в начале координат системы координат.
Эти данные показывают четырехэлементный ULA с направленными элементами в локальной правой системе координат. Элементы лежат на y - оси с их осями опорного направления, указывающими в x - направление. В этом случае свойство ArrayAxis установлено в 'y.
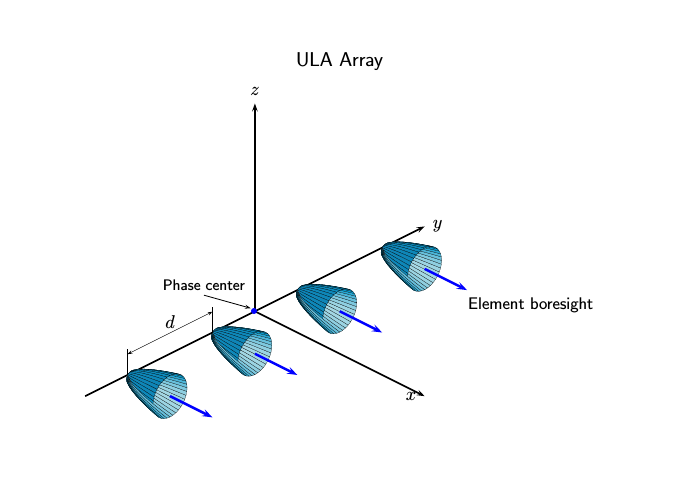
Направление Опорного направления Элемента ULA. В ULA направления опорного направления каждого элемента указывают в том же направлении. Направление является ортогональным к оси массивов. Это направление зависит от выбора свойства ArrayAxis.
| Значение свойства ArrayAxis | Положения элемента и направления опорного направления |
|---|---|
'x' | Элементы массива лежат на x - ось. Векторы опорного направления элемента указывают вдоль y - ось. |
'y' | Элементы массива лежат на y - ось. Векторы опорного направления элемента указывают вдоль x - ось. |
'z' | Элементы массива лежат на z - ось. Векторы опорного направления элемента указывают вдоль x - ось. |
Локальные координаты, адаптированные к универсальной линейной матрице
Создайте два примера универсальной линейной матрицы и отобразите координаты элементов относительно систем локальной координаты, заданных массивами.
Во-первых, создайте ULA с 4 элементами с половиной интервала элемента метра.
sULA = phased.ULA('NumElements',4,'ElementSpacing',0.5); ElementLocs = getElementPosition(sULA)
ElementLocs = 3×4
0 0 0 0
-0.7500 -0.2500 0.2500 0.7500
0 0 0 0
viewArray(sULA)

Источник центральной массивом системы локальной координаты установлен в центр фазы массива. Центр фазы является средним значением положений элемента массива.
disp(mean(ElementLocs'))
0 0 0
Поскольку массив имеет четное число элементов, никакой элемент массива на самом деле не находится в центре фазы (0,0,0).
Затем создайте ULA с 5 элементами с тридцатисантиметровым интервалом элемента.
sULA1 = phased.ULA('NumElements',5,'ElementSpacing',0.3); ElementLocs = getElementPosition(sULA1)
ElementLocs = 3×5
0 0 0 0 0
-0.6000 -0.3000 0 0.3000 0.6000
0 0 0 0 0
viewArray(sULA1)

Поскольку массив имеет нечетное число элементов в каждой строке и столбце, центральный элемент массива находится в центре фазы.
Источник массивов и Центр Фазы. Универсальный прямоугольный массив (URA) является массивом антенны или элементов микрофона, помещенных на обычную двумерную сетку. Геометрия URA и местоположения и ориентации его элементов определяется несколькими параметрами: размерности массива, расстояния между элементами и свойства ArrayNormal. Для URA система локальной координаты адаптируется к массиву — элементы являются автоматически присвоенными положениями в системе локальной координаты. Источник системы локальной координаты является геометрическим центром массива. Центр фазы массива совпадает с геометрическим центром. Элементы являются автоматически присвоенными положениями в этой системе локальной координаты. Положения определяются свойством ArrayNormal, которое может принять значения 'x', 'y' или 'z'. Все элементы лежат в плоскости, проходящей через источник и ортогональный к оси, заданной в этом свойстве. Например, когда свойство ArrayNormal установлено в 'x', элементы массива лежат в yz - плоскость как показано в фигуре. Данные показывают 2 4 элемент, URA с элементами расположил с интервалами метры d независимо и в y и в направлениях z.
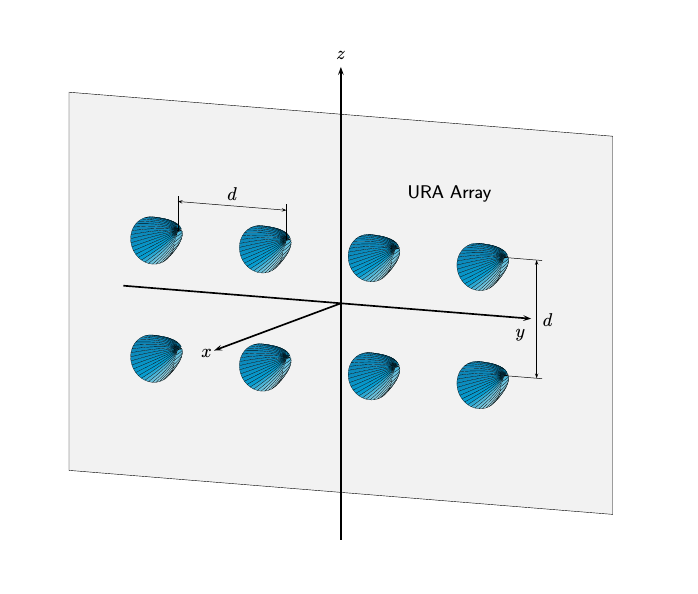
Направление Опорного направления элемента. В URA, как ULA, направления опорного направления каждого элемента указывают в том же направлении. Вы управляете этим направлением с помощью свойства ArrayNormal. Для URA, показанного в предыдущей фигуре, свойство ArrayNormal установлено в 'x'. Затем опорные направления элемента указывают вдоль x - ось.
| Значение свойства ArrayNormal | Положения элемента и направления опорного направления |
|---|---|
'x' | Элементы массива лежат на yz - плоскость. Векторы опорного направления элемента указывают вдоль x - ось. |
'y' | Элементы массива лежат на zx - плоскость. Векторы опорного направления элемента указывают вдоль y - ось. |
'z' | Элементы массива лежат на xy - плоскость. Векторы опорного направления элемента указывают вдоль z - ось. |
Локальные координаты, адаптированные к универсальному прямоугольному массиву
Создайте два примера универсальных прямоугольных массивов и отобразите координаты элементов относительно систем локальной координаты, заданных массивами.
Во-первых, создайте 2 4 URA с половиной интервала элемента метра.
sURA = phased.URA('Size',[2 4],'ElementSpacing',[0.5 0.5]); ElementLocs = getElementPosition(sURA)
ElementLocs = 3×8
0 0 0 0 0 0 0 0
-0.7500 -0.7500 -0.2500 -0.2500 0.2500 0.2500 0.7500 0.7500
0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500
viewArray(sURA)

Центр фазы массива является средним значением положений элемента массива. Источник системы локальной координаты массивов установлен в центр фазы массива.
disp(mean(ElementLocs'))
0 0 0
Поскольку массив имеет четное число элементов в каждой строке и столбце, никакой элемент массива на самом деле не находится в центре фазы (0,0,0).
Затем создайте 5 3 URA с тридцатисантиметровым интервалом элемента.
sURA1 = phased.URA([5 3],'ElementSpacing',[0.3 0.3]);
ElementLocs = getElementPosition(sURA1)ElementLocs = 3×15
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-0.3000 -0.3000 -0.3000 -0.3000 -0.3000 0 0 0 0 0 0.3000 0.3000 0.3000 0.3000 0.3000
0.6000 0.3000 0 -0.3000 -0.6000 0.6000 0.3000 0 -0.3000 -0.6000 0.6000 0.3000 0 -0.3000 -0.6000
viewArray(sURA1)

Поскольку массив имеет нечетное число элементов в каждой строке и столбце, центральный элемент массива находится в центре фазы.
Сигнал прибывает в массив от точки в 1 000 метров от вперед +x-axis глобальной системы координат. Локальный массив URA вращается 30 градусов по часовой стрелке вокруг оси Y. Вычислите угол прибытия сигнала в осях локального массива.
laxes = roty(30); [rng,ang] = rangeangle([1000,0,0]',[0,0,0]',laxes)
rng = 1.0000e+03
ang = 2×1
0
30.0000
Источник массивов и Центр Фазы. Универсальный круговой массив (UCA) является массивом антенны или элементов микрофона, расположенных с интервалами под равными углами вокруг круга. Системный объект phased.UCA создает особый случай UCA. В этом случае направления опорного направления элемента указывают далеко от источника массивов как спицы колеса. Источник системы локальной координаты является геометрическим центром массива. Геометрия UCA и местоположения и ориентации его элементов определяется тремя параметрами: радиус массива, числа элементов и свойства ArrayNormal. Элементы являются автоматически присвоенными положениями в системе локальной координаты. Положения определяются свойством ArrayNormal, которое может принять значения 'x', 'y' или 'z'. Все элементы лежат в плоскости, проходящей через источник и ортогональный к оси, заданной в этом свойстве. Центр фазы массива совпадает с геометрическим центром. Например, когда свойство ArrayNormal установлено в 'x', элементы массива лежат в yz - плоскость как показано в фигуре. Можно создать более общий UCA с произвольными направлениями опорного направления с помощью Системного объекта phased.ConformalArray.
Эти данные показывают UCA с 8 элементами с элементами, лежащими в плоскости yz.
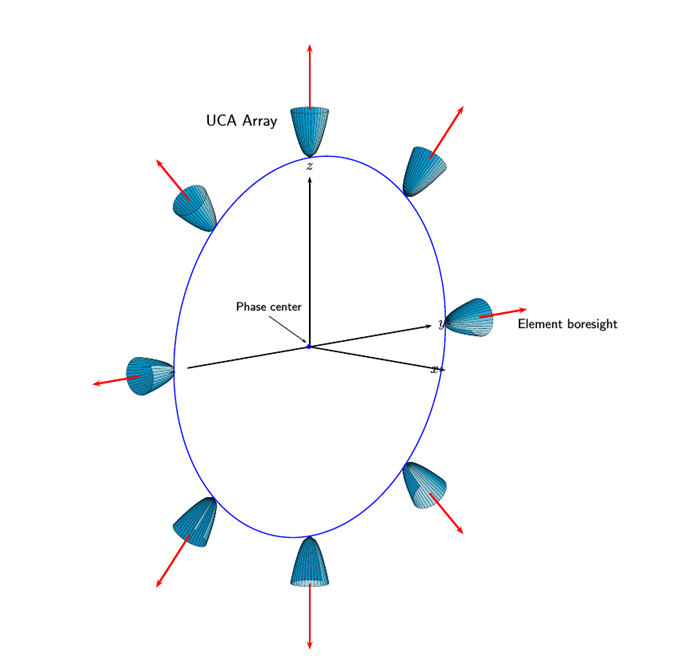
Направления Опорного направления элемента. В UCA, заданном Системным объектом phased.UCA, направления опорного направления элемента указывают радиально исходящий от источника массивов. В UCA, показанном в предыдущей фигуре, потому что свойство ArrayNormal установлено в 'x', направления опорного направления элемента указывают радиально исходящий в yz - плоскость.
| Значение свойства ArrayNormal | Положения элемента и направления опорного направления |
|---|---|
'x' | Элементы массива лежат на yz - плоскость. Все векторы опорного направления элемента лежат в yz - плоскость и точка, радиально исходящая от источника. |
'y' | Элементы массива лежат на zx - плоскость. Все векторы опорного направления элемента лежат в zx - плоскость и точка, радиально исходящая от источника. |
'z' | Элементы массива лежат на xy - плоскость. Все векторы опорного направления элемента лежат в xy - плоскость и точка, радиально исходящая от источника. |
Источник массивов и Центр Фазы. Можно использовать phased.ConformalArray, чтобы создать массивы произвольной формы. В отличие от случая универсальных массивов, необходимо задать положения элемента явным образом. N - массив элемента требует спецификации N 3-D координаты в системе локальной координаты массивов. Источник конформного массива может быть расположен в любой произвольной точке. Направления опорного направления элементов конформного массива не должны быть параллельными. Азимут и углы повышения, задающие направления опорного направления, относительно системы локальной координаты. Центр фазы массива не должен совпадать с геометрическим центром. Те же свойства применяются к массиву phased.HeterogeneousConformalArray.
Этот рисунок показывает положения и ориентации конформного массива с 4 элементами.
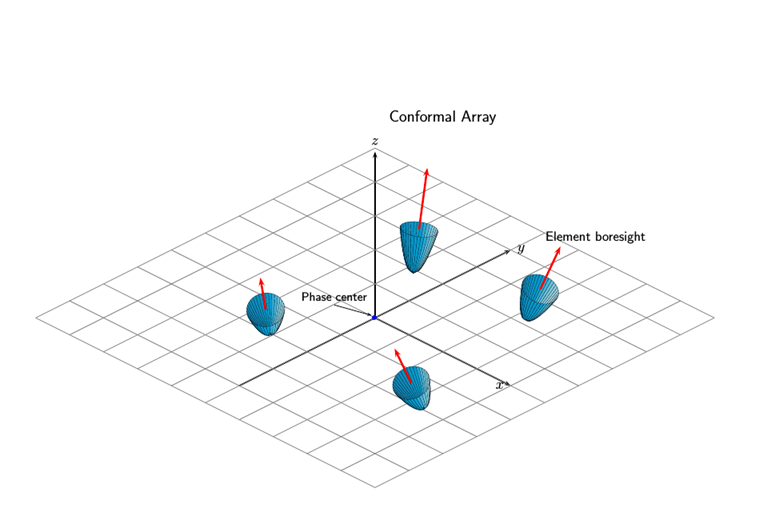
Конформный массив с 4 элементами
Создайте массив с 4 элементами с помощью Системного объекта ConformalArray. Примите, что рабочая частота составляет 900 МГц. Отобразите геометрию массивов и векторы нормали.
fc = 900e6; c = physconst('LightSpeed'); lam = c/fc; x = [1.0,-.5,0,.8]*lam/2; y = [-.4,-1,.5,1.5]*lam/2; z = [-.3,.3,0.4,0]*lam/2; sIso = phased.CosineAntennaElement(... 'FrequencyRange',[0,1e9]); nv = [-140,-140,90,90;80,80,80,80]; sConformArray = phased.ConformalArray('Element',sIso,... 'ElementPosition',[x;y;z],... 'ElementNormal',nv); pos = getElementPosition(sConformArray)
pos = 3×4
0.1666 -0.0833 0 0.1332
-0.0666 -0.1666 0.0833 0.2498
-0.0500 0.0500 0.0666 0
normvec = getElementNormal(sConformArray)
normvec = 2×4
-140 -140 90 90
80 80 80 80
viewArray(sConformArray,'ShowIndex','All','ShowNormal',true)

Во многих приложениях обработки матриц необходимо преобразовать между глобальными и локальными координатами. Две служебных функции, global2localcoord и local2globalcoord, выполняют эти преобразования.
Определите положение цели в прямоугольных координатах в глобальной системе координат. Во-первых, задайте локальные сферические координаты цели относительно URA. Центр URA задает источник системы локальной координаты. Целевое местоположение в локальных сферических координатах является азимутом на 30 °, повышением на 45 ° и областью значений на 1 000 м. Чтобы преобразовать в глобальные прямоугольные координаты, задайте положение системного источника локальной координаты в глобальных координатах. Источник системы локальной координаты (1000,500,100) м от глобального источника.
Преобразуйте координаты точки к глобальным прямоугольным координатам. Чтобы преобразовать от локальных сферических координат до глобальных прямоугольных координат, используйте опцию 'sr' в вызове функции local2globalcoord.
gCoord = local2globalcoord([30; 45; 1000],'sr',[1000; 500; 100])gCoord = 3×1
103 ×
1.6124
0.8536
0.8071
Цель расположена в (1612,854,807) м в глобальной системе координат.
Copyright 2018 The MathWorks, Inc”.
Определите положение цели в локальных сферических координатах, сосредоточенных в центре фазы массива URA. Центр URA задает источник системы локальной координаты и имеет глобальные прямоугольные координаты (5000,3000,50). Оси локальной координаты URA (0,1,0), (1,0,0), и (0,0,-1). Задайте глобальные прямоугольные координаты цели в (1000,500,10).
Преобразуйте координаты цели к локальным сферическим прямоугольным координатам. Чтобы преобразовать от глобальных прямоугольных координат до локальных сферических координат, используйте опцию 'rs' в вызове функции global2localcoord.
lCoord = global2localcoord([5000; 3000; 50],'rs',[1000; 500; 100], ... [0 1 0; 1 0 0; 0 0 -1])
lCoord = 3×1
103 ×
0.0580
0.0006
4.7173
Вывод имеет форму (азимут, el, rng). Цель расположена в локальных сферических координатах в азимуте на 58 °, повышении на 0,6 ° и 4 717 м.
