Область значений и угловое вычисление
[rng,ang]
= rangeangle(pos)[rng,ang]
= rangeangle(pos,refpos)[rng,ang]
= rangeangle(pos,refpos,refaxes)[rng,ang]
= rangeangle(___,model)Функциональный rangeangle определяет длину пути распространения и направление контура сигнала от исходной точки, или набор источника указывает на контрольную точку. Функция поддерживает две модели распространения – модель свободного пространства и модель 2D луча. Модель свободного пространства является одним путем угла обзора от исходной точки до контрольной точки. 2D луч многопутевая модель генерирует два пути. Первый путь следует за путем свободного пространства. Второй путь является отраженным путем от граничной плоскости в z = 0. Направления контура заданы или относительно глобальной системы координат в контрольной точке или относительно системы локальной координаты в контрольной точке. Расстояния и углы в контрольной точке не зависят, на которое направление сигнал перемещается вдоль пути.
[ возвращает длину пути распространения, rng,ang]
= rangeangle(pos)rng, и направляющие углы, ang, пути прохождения сигнала от исходной точки или набора исходных точек, pos, к источнику глобальной системы координат. Направляющие углы являются азимутом и повышением относительно осей глобальной координаты в начале координат. Сигналы следуют за путем угла обзора от исходной точки до источника. Путь угла обзора соответствует геометрической прямой линии между точками.
[ также задает контрольную точку или набор контрольных точек, rng,ang]
= rangeangle(pos,refpos)refpos. rng теперь содержит длину пути распространения от исходных точек до контрольных точек. Направляющие углы являются азимутом и повышением относительно осей глобальной координаты в контрольных точках. Можно задать несколько точек и несколько контрольных точек.
[, также задает модель распространения. Когда rng,ang]
= rangeangle(___,model)model установлен в 'freespace', сигнал распространяет вдоль пути угла обзора от исходной точки до точки приема. Когда model установлен в 'two-ray', сигнал распространяет вдоль двух путей от исходной точки до точки приема. Первый путь является путем угла обзора. Второй путь является отражающимся путем. В этом случае функция возвращает расстояния и углы для двух путей для каждой исходной точки и соответствующей контрольной точки.
|
Исходное положение точки, заданное как вектор 3 на 1 с действительным знаком или 3 с действительным знаком N матрицей. Матрица представляет несколько исходных точек. Столбцы содержат Декартовы координаты точек N в форме Когда Модули положения являются метрами. |
|
Положение контрольной точки, заданное как вектор 3 на 1 с действительным знаком или 3 с действительным знаком N матрицей. Матрица представляет несколько контрольных точек. Столбцы содержат Декартовы координаты точек N ins форма Когда Модули положения являются метрами. Значение по умолчанию: |
|
Системные оси локальной координаты, заданные как 3х3 матрица с действительным знаком или 3 3 N массивом. Для массива каждая страница соответствует локальной координате оси в каждой контрольной точке. Столбцы в Значение по умолчанию: |
|
Модель Propagation, заданная как Значение по умолчанию: |
|
Область значений распространения, возвращенная как 1 с действительным знаком N вектором или 1 с действительным знаком 2N матрицей. Когда Когда |
|
Азимут и углы повышения, возвращенные как 2 N матрицей или 2 2N матрицей. Каждый столбец представляет направляющий угол в форме Когда Когда Угловые модули в градусах. |
Вычислите область значений и угол цели, расположенной в (1000,2000,50) метры от источника.
TargetLoc = [1000;2000;50]; [tgtrng,tgtang] = rangeangle(TargetLoc)
tgtrng = 2.2366e+03
tgtang = 2×1
63.4349
1.2810
Вычислите область значений и угол цели, расположенной в (1000,2000,50) метры относительно локального источника в (100,100,10) метры.
TargetLoc = [1000;2000;50]; Origin = [100;100;10]; [tgtrng,tgtang] = rangeangle(TargetLoc,Origin)
tgtrng = 2.1028e+03
tgtang = 2×1
64.6538
1.0900
Вычислите область значений и угол цели, расположенной в (1000,2000,50) метры, но относительно системного источника локальной координаты в (100,100,10) метры. Выберите кадр ссылки локальной координаты, который вращается об оси z на 45 ° от осей глобальной координаты.
targetpos = [1000;2000;50]; origin = [100;100;10]; refaxes = [1/sqrt(2) -1/sqrt(2) 0; 1/sqrt(2) 1/sqrt(2) 0; 0 0 1]; [tgtrng,tgtang] = rangeangle(targetpos,origin,refaxes)
tgtrng = 2.1028e+03
tgtang = 2×1
19.6538
1.0900
Вычислите расстояния распространения 2D луча и углы падения лучей из источника, расположенного в (1000 1000 500) метры от источника. Получатель расположен в (100,100,200) метры от источника.
sourceLoc = [1000;1000;500];
receiverLoc = [100;100;200];
[sourcerngs,sourceangs] = rangeangle(sourceLoc,receiverLoc,'two-ray')sourcerngs = 1×2
103 ×
1.3077 1.4526
sourceangs = 2×2
45.0000 45.0000
13.2627 -28.8096

Найдите область значений и угол той же цели с тем же источником, но относительно локальной координаты оси. Оси локальной координаты вращаются вокруг оси z 45 градусами осей глобальной координаты.
refaxes = rotz(45);
[sourcerngs,sourceangs] = rangeangle(sourceLoc,receiverLoc,refaxes,'two-ray')sourcerngs = 1×2
103 ×
1.3077 1.4526
sourceangs = 2×2
0 0
13.2627 -28.8096
Вычислите области значений и углы двух целей, расположенных в (1000,200,500) и (2500,80,-100) метры относительно двух локальных источников в (100,300,-40) и (500,-60,10) метры. Задайте два различных набора локальных осей.
targetPos = [1000,2500;200,80;500,-100]; origins = [100,500;300,-60;-40,10]; ax(:,:,1) = rotx(40)*rotz(10); ax(:,:,2) = roty(5)*rotx(10); [tgtrng,tgtang] = rangeangle(targetPos,origins,ax)
tgtrng = 1×2
103 ×
1.0543 2.0079
tgtang = 2×2
6.7285 4.2597
26.9567 1.1254
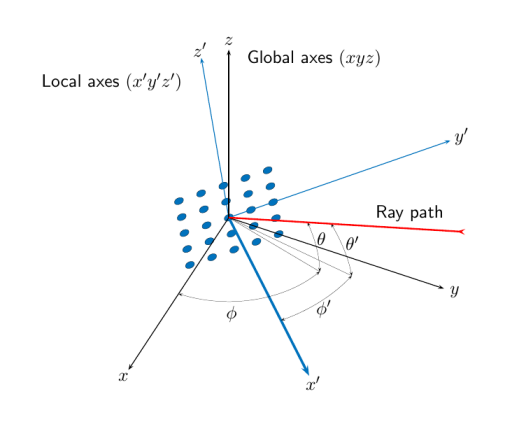
Функция rangeangle возвращает расстояние пути и углы пути или в системах глобальной или в локальной координаты. Каждый элемент антенны или микрофона и массив имеют шаблон усиления, который выражается в локальных угловых координатах азимута и повышения. Как элемент или массив перемещается или вращается, шаблон усиления несут с ним. Определить силу сигнала’, необходимо знать угол, который путь прохождения сигнала делает относительно локальных угловых координат элемента или массива. По умолчанию функция rangeangle определяет угол, который путь прохождения сигнала делает относительно глобальных координат. Если вы добавляете аргумент refaxes, можно вычислить углы относительно локальных координат. Как рисунок, эти данные показывают универсальный прямоугольный массив (URA) 5 на 5, вращаемый от глобальных координат (xyz) с помощью refaxes. Ось x' системы локальной координаты (x'y'z') выравнивается с основной осью массива и перемещается, когда массив перемещается. Длина пути независима от ориентации. Глобальная система координат задает азимут и углы повышений, (φ,θ) и система локальной координаты задают азимут и углы повышений (φ',θ').
Оси локальной и глобальной координаты
Канал распространения 2D луча является следующим, подходят в сложности от канала свободного пространства, и самый простой случай многопутевой среды распространения. Канал свободного пространства моделирует прямолинейный путь угла обзора от точки 1 до точки 2. В канале 2D луча носитель задан как гомогенный, изотропный носитель с отражающимся плоским контуром. Контур всегда устанавливается в z = 0. Существует самое большее два распространения лучей от точки 1 до точки 2. Первый путь к лучу распространяет вдоль того же пути угла обзора как в канале свободного пространства (см. Систему phased.FreeSpace object™). Путь угла обзора часто называется прямым путем. Второй луч отражается от контура прежде, чем распространить к точке 2. Согласно Закону Отражения, угол отражения равняется углу падения. В ближних симуляциях, таких как системы сотовой связи и автомобильные радары, можно принять, что отражающаяся поверхность, земля или океанская поверхность, является плоской.
phased.TwoRayChannel и задержка распространения модели Системных объектов phased.WidebandTwoRayChannel, сдвиг фазы, эффект Доплера и эффекты потерь для обоих путей. Для отраженного пути эффекты потерь включают отражательную потерю в контур.
Фигура иллюстрирует два пути к распространению. От исходного положения, ss, и положения получателя, sr, можно вычислить углы падения обоих путей, θ′los и θ′rp. Углы падения являются повышением и углами азимута прибывающего излучения относительно системы локальной координаты. В этом случае система локальной координаты совпадает с глобальной системой координат. Можно также вычислить углы передачи, θlos и θrp. В глобальных координатах угол отражения на контуре совпадает с углами θrp и θ′rp. Отражательный угол важен, чтобы знать, когда вы используете зависимые углом данные отражательной потери. Можно определить отражательный угол при помощи функции rangeangle и установки ссылочных осей к глобальной системе координат. Общую длину пути для пути угла обзора показывает в фигуре Rlos, который равен геометрическому расстоянию между источником и получателем. Общей длиной пути для отраженного пути является Rrp= R1 + R2. Количество L является наземной областью значений между источником и получателем.
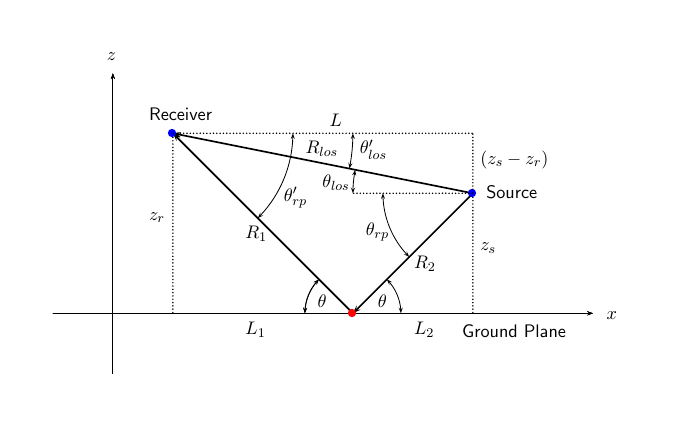
Можно легко вывести точные формулы для длин пути и углов с точки зрения наземной области значений и высот объектов в глобальной системе координат.
azel2phitheta | azel2uv | global2localcoord | local2globalcoord
