В этом примере вы собираетесь смоделировать простую механическую систему и наблюдать ее поведение при различных условиях. Этот пример иллюстрирует существенные шаги к создаванию физической модели и делает вас знакомыми с использованием основных блоков Simscape™.
Для экономящих время методов и усовершенствованных способов анализировать данные моделирования, смотрите Существенные Шаги для Построения Физического Образцового примера.
Следующее схематическое представляет простую модель автомобильной приостановки. Это состоит из пружины и демпфера, соединенного с телом (представленный как масса), который взволнован силой. Можно отличаться параметры модели, такие как жесткость пружины, масса тела или профиль силы, и просмотреть получившиеся изменения в скорости и положении тела.
Чтобы создать эквивалентную схему Simscape, выполните эти шаги:
Откройте Simulink® Library Browser, как описано в Библиотеках блоков Simscape.
Создайте новую модель Simulink с помощью шаблона Blank Model. Программное обеспечение создает пустую модель в памяти и отображает ее в новом окне редактора моделей.
Поочередно, можно ввести ssc_new в Командной строке MATLAB®, чтобы создать новую модель, предварительно заполненную с определенными необходимыми и обычно используемыми блоками. Для получения дополнительной информации смотрите Создание Новой Модели Simscape.
По умолчанию Редактор Simulink скрывает автоматические имена блока в диаграммах модели. Чтобы отобразить скрытые имена блока в учебных целях, выберите Display и снимите флажок Hide Automatic Names.
Откройте библиотеку Simscape> Foundation Library> Mechanical> Translational Elements.
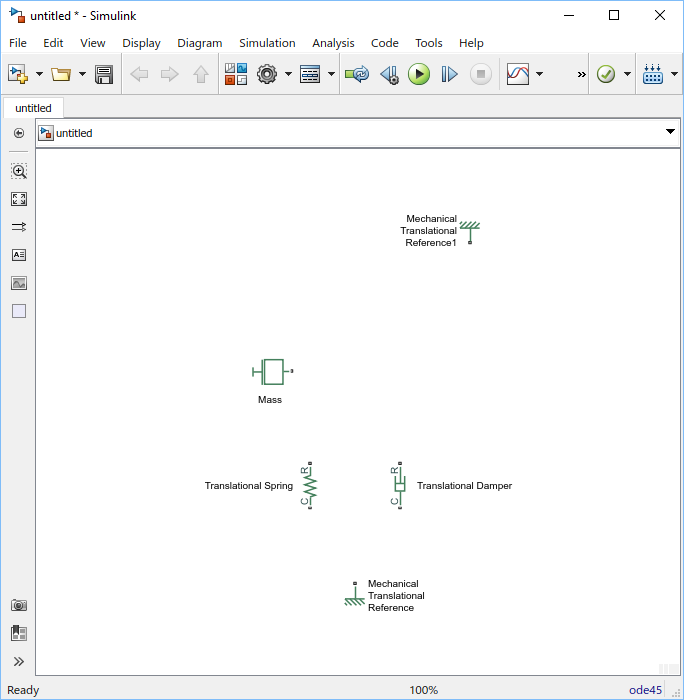
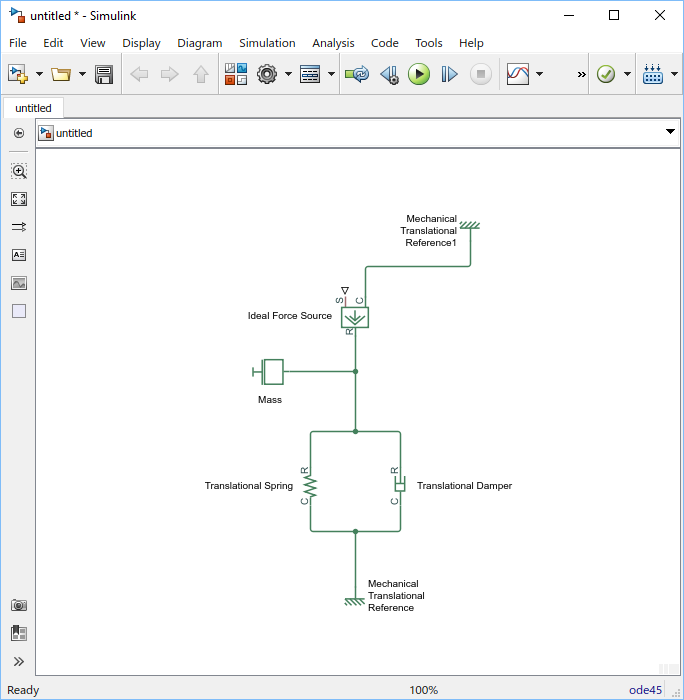
Перетащите Массу, Переводный Spring, Переводный Демпфер и два Механических Переводных Ссылочных блока в окно модели.
Сориентируйте блоки как показано на следующем рисунке. Чтобы повернуть блок, выберите его и нажмите Ctrl+R.
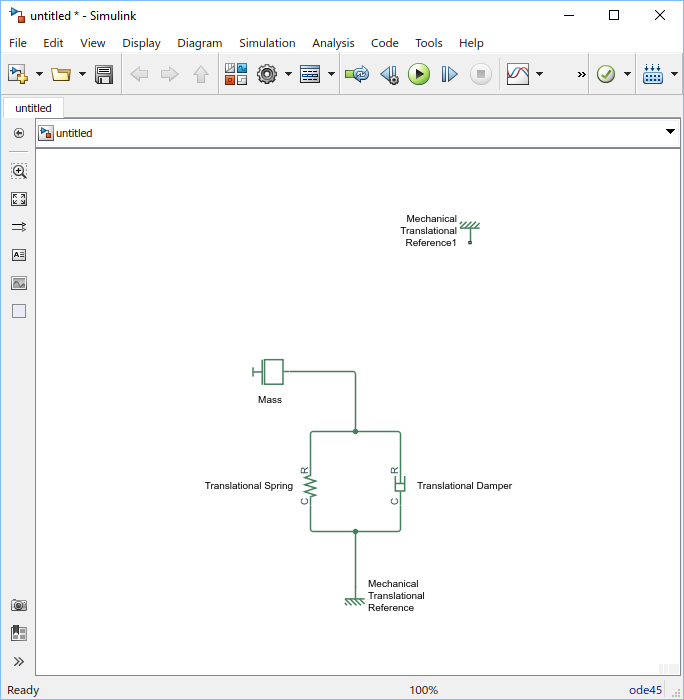
Соедините Переводный Spring, Переводный Демпфер и Массовые блоки к одному из Механических Переводных Ссылочных блоков как показано на следующем рисунке.
Чтобы добавить представление силы, действующей на массу, откройте библиотеку Simscape> Foundation Library> Mechanical> Mechanical Sources и добавьте Идеальный Исходный блок Силы в вашу схему.
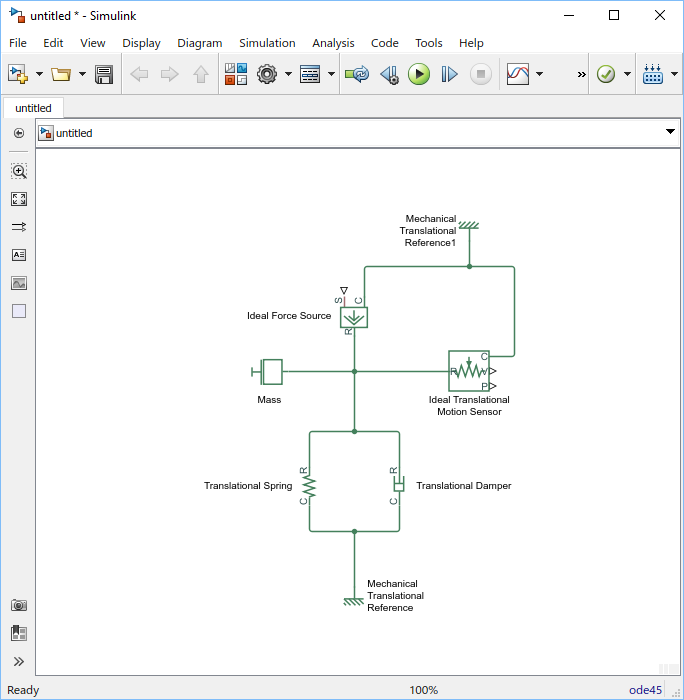
Чтобы отразить правильное направление силы, показанной в схематичном оригинале, инвертируйте блок путем выбора Diagram> Rotate & Flip> Flip Block> Up-Down от верхней панели меню окна модели. Соедините порт C блока (для “случая”) к второму блоку Mechanical Translational Reference и его порту R (для “стержня”) к блоку Mass, как показано ниже.
Добавьте датчик, чтобы измерить скорость и положение массы. Поместите блок Ideal Translational Motion Sensor от библиотеки Mechanical Sensors в вашу схему и соедините его как показано ниже.
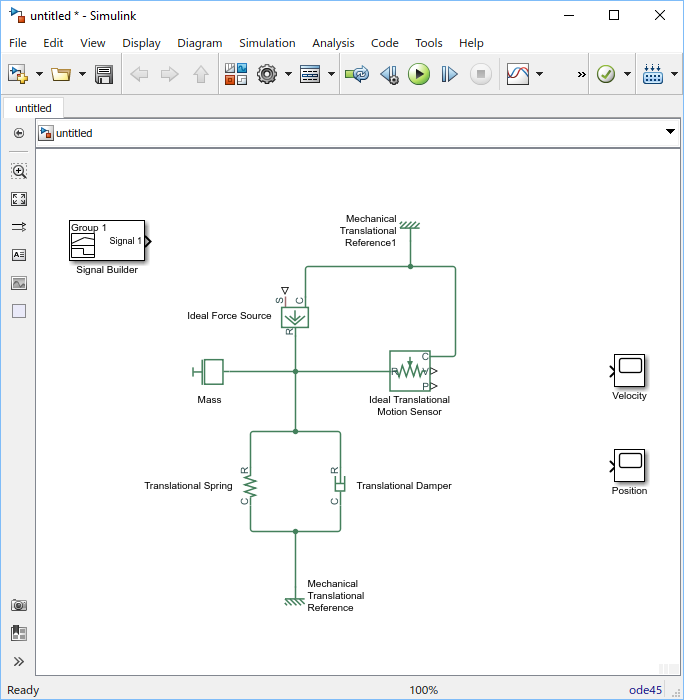
Теперь необходимо добавить источники и осциллографы. Они найдены в регулярных Библиотеках Simulink. Откройте библиотеку Simulink> Sources и скопируйте блок Signal Builder в модель. Затем откройте библиотеку Simulink> Sinks и скопируйте два блока Осциллографа. Переименуйте один из блоков Scope к Velocity и другого к Position.
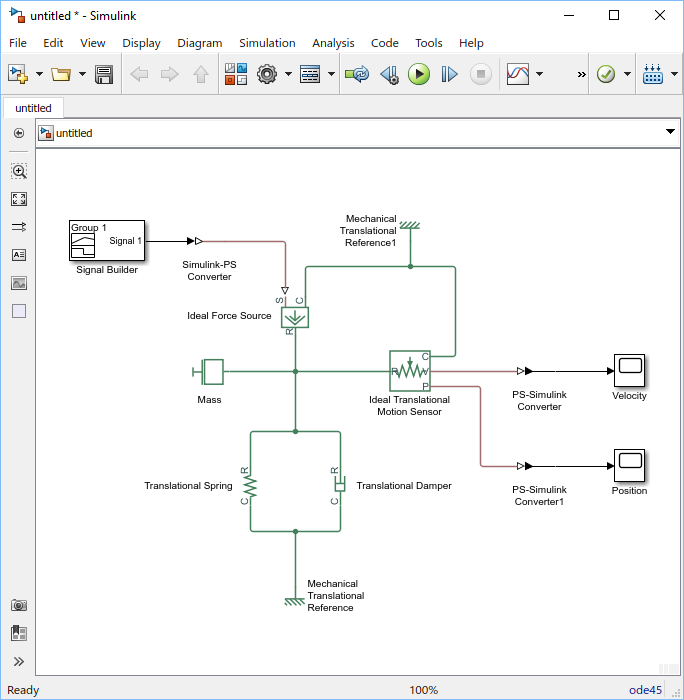
Каждый раз, когда вы соединяете источник Simulink или осциллограф к схеме Simscape, необходимо использовать соответствующий блок конвертера, чтобы преобразовать Сигналы Simulink в физические сигналы и наоборот. Откройте библиотеку Simscape> Utilities и скопируйте блок Simulink-PS Converter и два блока Конвертера Simulink PS в модель. Соедините блоки как показано ниже.
Каждая топологически отличная физическая сеть в схеме требует точно одного Блока Configuration Решателя, найденного в библиотеке Simscape> Utilities. Скопируйте этот блок в свою модель и соедините его со схемой путем создания точки условного перехода и соединения его с единственным портом Блока Configuration Решателя. Ваша схема теперь должна выглядеть так.
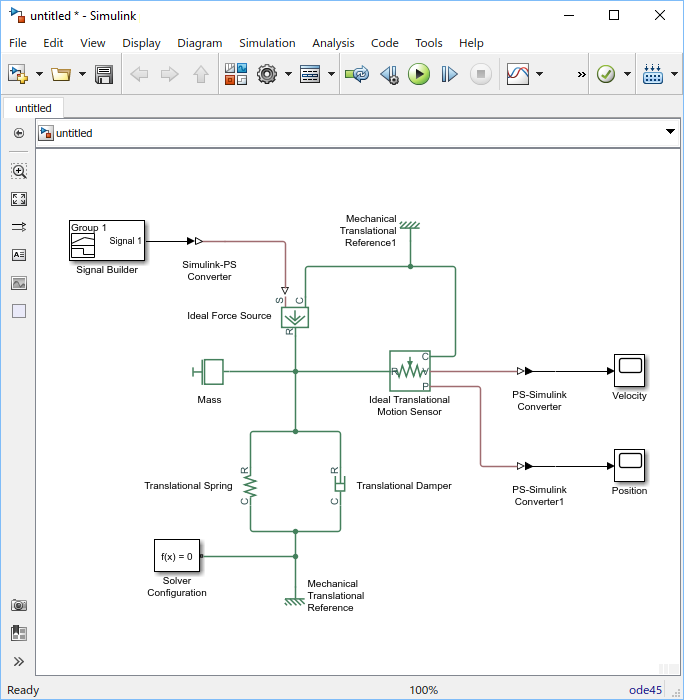
Ваша блок-схема теперь завершена. Сохраните его как mech_simple.
После того, как вы соединили блок-схему своей модели, как описано в предыдущем разделе, необходимо выбрать решатель и обеспечить правильные значения для параметров конфигурации.
Чтобы подготовиться к симуляции модели, выполните эти шаги:
Выберите решатель Simulink. На верхней панели меню окна модели выберите Simulation > Model Configuration Parameters. Диалоговое окно Configuration Parameters открывается, показывая узел Solver.
Под Solver selection, набор Solver к ode23t (mod.stiff/Trapezoidal).
Расширьте Solver details и установите Max step size на 0.2.
Также обратите внимание, что Simulation time задан, чтобы быть между 0 и 10 секундами. Можно настроить эту установку позже в случае необходимости.
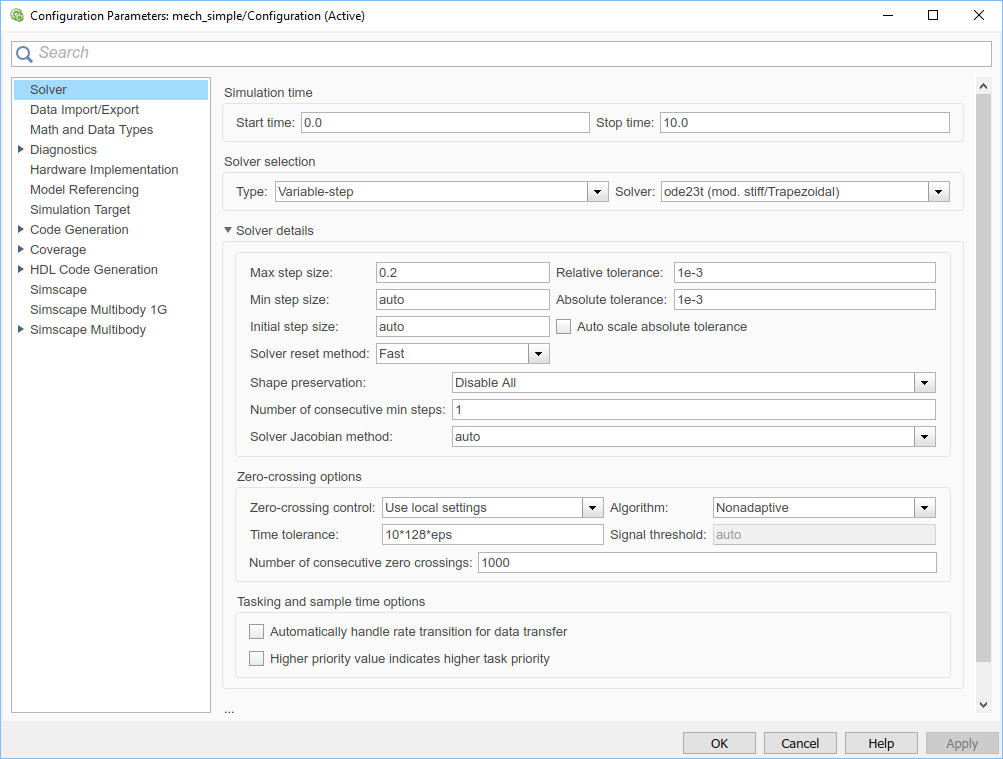
Нажмите OK, чтобы закрыть диалоговое окно Configuration Parameters.
Сохраните модель.
После того, как вы соединили блок-схему и задали начальные установки для вашей модели, можно запустить симуляцию.
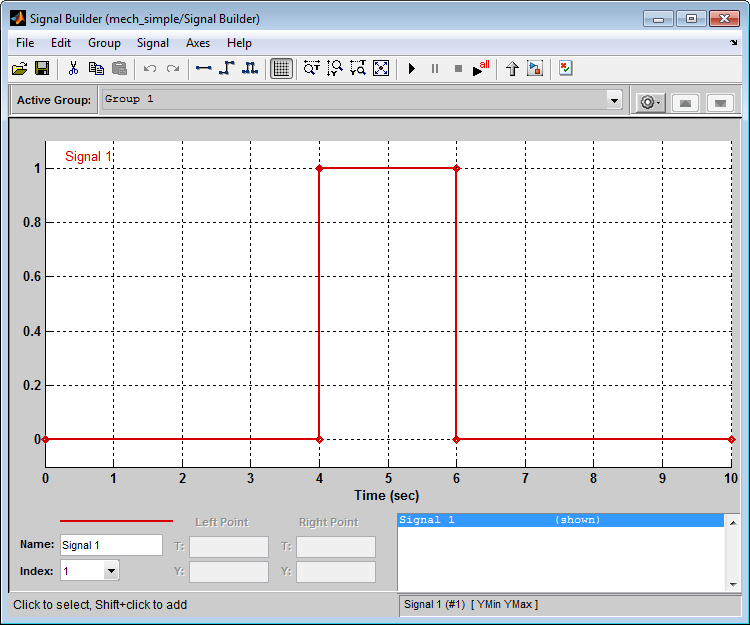
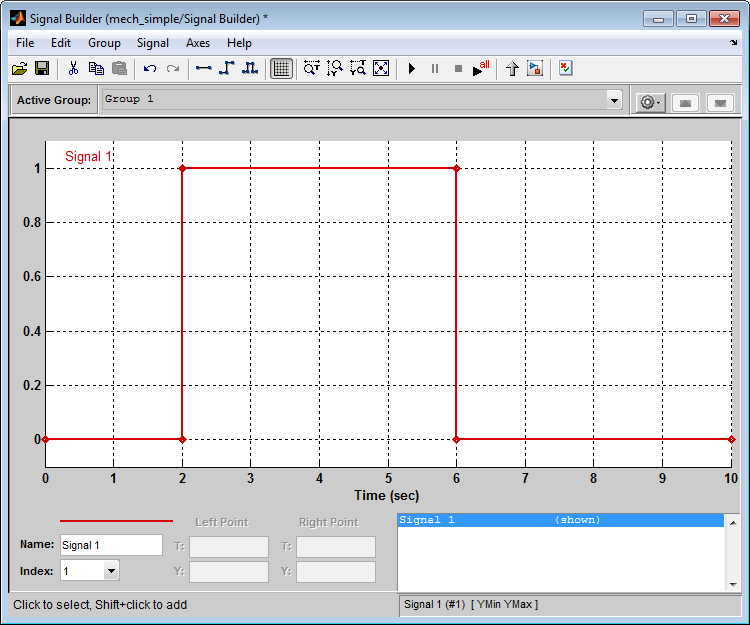
Входной сигнал для силы обеспечивается блоком Signal Builder. Профиль сигнала показывают на рисунке ниже. Это запускается со значения 0, затем в 4 секунды существует ступенчатое изменение к 1, и затем это возвращается к 0 в 6 секунд. Это - профиль по умолчанию.
Скоростной осциллограф выводит массовую скорость, и Положение определяет объем выходных параметров массовое смещение как функция времени. Дважды кликните оба осциллографа, чтобы открыть их.
Чтобы запустить симуляцию, щелкните![]() на панели инструментов окна модели. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Для подробного описания этого процесса смотрите Как Моделирование Simscape. Завершение этого шага может занять несколько секунд. Сообщение в нижнем левом углу окна модели обеспечивает обновление статуса.
на панели инструментов окна модели. Решатель Simscape оценивает модель, вычисляет начальные условия и запускает симуляцию. Для подробного описания этого процесса смотрите Как Моделирование Simscape. Завершение этого шага может занять несколько секунд. Сообщение в нижнем левом углу окна модели обеспечивает обновление статуса.
Если симуляция начинает запускаться, окна осциллографа Скорости и Положения отображают результаты симуляции, как показано на следующем рисунке.
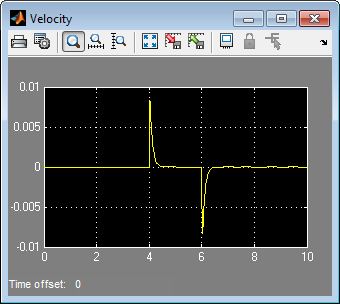
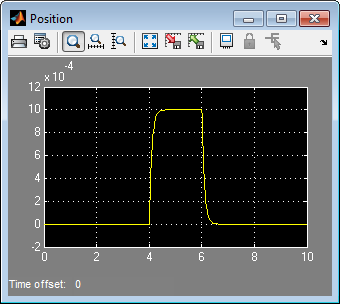
В начале масса в покое. Затем в 4 секунды, когда входной сигнал изменяется резко, массовые скоростные скачки в положительном направлении и постепенно возвратах к нулю. Массовое положение одновременно изменяется более постепенно, вследствие инерции и затухания, и остается в новом значении, пока сила реагирует на него. В 6 секунд, когда входной сигнал возвращается, чтобы обнулить, скорость получает зеркальный скачок, и масса постепенно возвращается к своему исходному положению.
Можно теперь настроить различные входные параметры и параметры блоков и видеть их эффект на массовую скорость и смещение.
После выполнения начальной симуляции можно экспериментировать с корректировкой различных входных параметров и параметров блоков.
Попробуйте следующие корректировки:
Этот пример показывает, как изменение во входном сигнале влияет на профиль силы, и поэтому массовое смещение.
Дважды кликните блок Signal Builder, чтобы открыть его.
Кликните по первому вертикальному сегменту профиля сигнала и перетащите его от 4 до 2 секунд, как показано ниже. Закройте диалоговое окно блока.
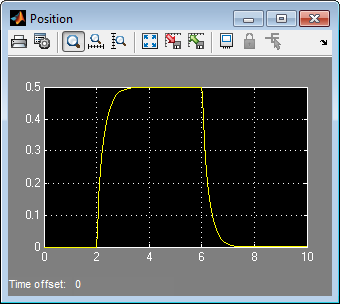
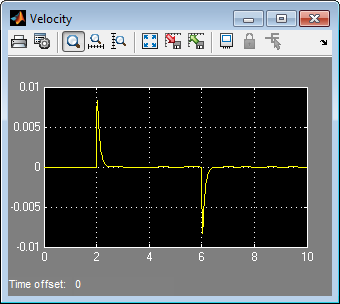
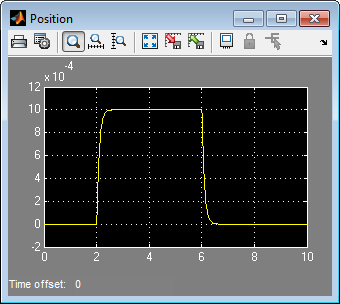
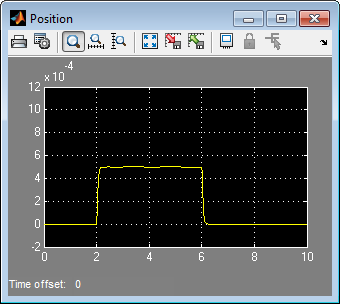
Запустите симуляцию. Результаты симуляции показывают на следующем рисунке.
В нашей модели сила действует на массу против переводной пружины и демпфера, соединенного параллельно. Этот пример показывает, как изменения в пружинной жесткости и вязкости демпфера влияют на массовое смещение.
Дважды кликните блок Translational Spring. Установите его Spring rate на 2000 N/m.
Запустите симуляцию. Увеличение пружинной жесткости приводит к меньшей амплитуде массового смещения, как показано на следующем рисунке.
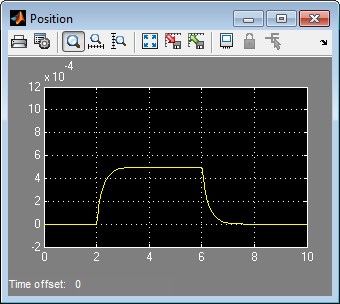
Затем, дважды кликните Переводный Демпфер. Установите его Damping coefficient на 500 N/(m/s).
Запустите симуляцию. Из-за увеличения вязкости масса медленнее и в достижении ее максимального смещения и в возврате исходному положению, как показано на следующем рисунке.
В нашей модели мы использовали блок PS-Simulink Converter в его настройке параметра по умолчанию, которая не задает модули. Поэтому осциллограф Position выводит массовое смещение в единицах длины по умолчанию, то есть, в метрах. Этот пример показывает, как изменить устройства вывода для массового смещения к миллиметрам.
Дважды кликните блок PS-Simulink Converter1. Введите mm в поле комбинированного списка Output signal unit и нажмите OK.
Запустите симуляцию. В окне scope Position щелкните![]() , чтобы автомасштабировать оси осциллографа. Массовое смещение теперь выводится в миллиметрах, как показано на следующем рисунке.
, чтобы автомасштабировать оси осциллографа. Массовое смещение теперь выводится в миллиметрах, как показано на следующем рисунке.