

Этот пример показывает, как сконфигурировать и сгенерировать код С для простой модели Simscape™ Multibody™. Пример основан на модели с четырьмя панелями под названием sm_four_bar. Модель использует решатель переменного шага, ode45 (Dormand-Prince), и поэтому требует, чтобы цель rsim сгенерировала код.
В командной строке MATLAB® введите sm_four_bar.
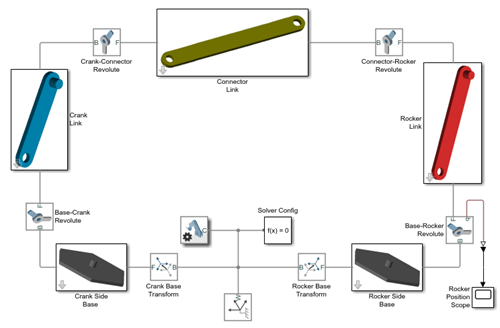
Программное обеспечение MATLAB открывает модель в качестве примера с четырьмя панелями. Сохраните модель с другим именем в удобной папке.
В меню Simulink® выберите Simulation> Model Configuration Parameters.
Окно Model Configuration Parameters позволяет вам задать цель генерации кода и установить опции отчета генерации кода для вашей модели.
В узле Code Generation окна Model Configuration Parameters, установленного параметр System target file на rsim.tlc.
Конечный файл rsim.tlc совместим с моделями Simscape Multibody, которые имеют решатели переменного шага.
В Code Generation> узел Report окна Model Configuration Parameters, проверяйте флажок Create code generation report и нажмите OK.
Программное обеспечение MATLAB создает и открывает отчет генерации кода, когда вы создаете свою модель.
В панели меню Simulink выберите Code> C/C++ Code> Build Model.
Программное обеспечение Simulink Coder™ генерирует код С для модели с четырьмя панелями. Отчет генерации кода для вашей модели открывается списком сгенерированного кода и файлов данных.