Реализуйте векторные модели контроллеров для однофазного асинхронного двигателя (SPIM)
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска

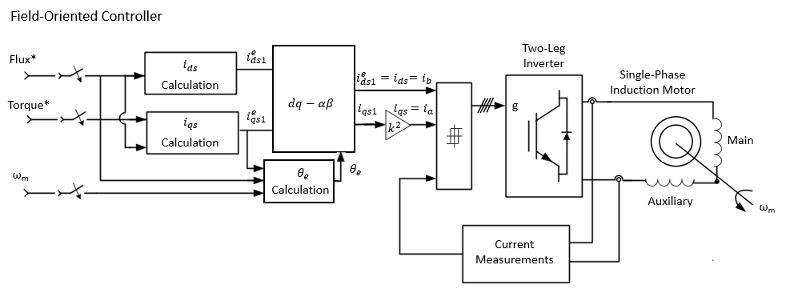
Блок Vector Controller (SPIM) реализует векторное управление для однофазной машины индукции (SPIM). Блок-схемы показывают, как контроллер реализует ориентированное на поле управление (FOC) или основанное на гистерезисе управление прямого крутящего момента (DTC) для SPIM. Для получения дополнительной информации смотрите блок Single-Phase Induction Motor Drive.

Controller type — Модель управленияFOC (значение по умолчанию) | DTC (two-level hysteresis) | DTC (five-level hysteresis)Опции для модели управления:
FOC — Ориентированное на поле управление
DTC (two-level hysteresis) — Двухуровневое гистерезисное прямое управление крутящим моментом
DTC (three-level hysteresis) — Трехуровневое гистерезисное прямое управление крутящим моментом
Каждая опция Controller type делает различный набор Controller и параметров Machine видимым. Порт блока Theta только видим для типов контроллера DTC.
Base sample time (s) — Блокируйте шаг расчета20e-6 (значение по умолчанию) | положительная скалярная величинаВремя выборки контроллера, в s. Время выборки должно быть кратным шагу времени симуляции.
Current hysteresis bandwidth (A) — Текущая гистерезисная пропускная способность0.5 (значение по умолчанию) | положительная скалярная величина
Текущая пропускная способность гистерезиса регулятора, в A. Это значение является общей гистерезисной пропускной способностью, распределенной симметрично вокруг текущего сетбола. Данные показывают случай, где текущим сетболом является Is*, и текущая пропускная способность гистерезиса регулятора установлена в dx.
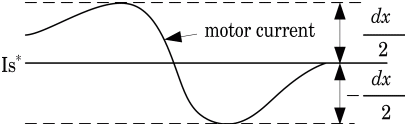
Выбор FOC для параметра Controller type делает этот параметр видимым.
Torque hysteresis bandwidth (N.m) — Закрутите гистерезисную пропускную способность0.1 (значение по умолчанию) | положительная скалярная величинаЗакрутите гистерезисную пропускную способность в N*m. Это значение является общей пропускной способностью, распределенной симметрично вокруг сетбола крутящего момента. Данные показывают случай, где сетболом крутящего момента является Te*, и пропускная способность гистерезиса крутящего момента установлена в dTe.
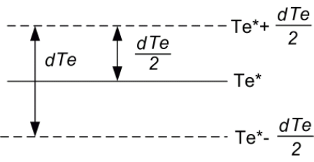
Выбор DTC (three-level hysteresis) или DTC (two-level hysteresis) для параметра Controller type делает этот параметр видимым.
Flux hysteresis bandwidth (Wb) — Теките гистерезисная пропускная способность0.001 (значение по умолчанию) | положительная скалярная величинаПропускная способность гистерезиса потока статора, в Wb. Это значение является общей пропускной способностью, распределенной симметрично вокруг сетбола потока. Данные показывают случай, где сетболом потока является ψ*, и пропускная способность гистерезиса крутящего момента установлена в dψ.
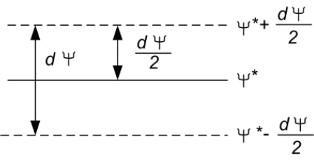
Выбор DTC (three-level hysteresis) или DTC (two-level hysteresis) для параметра Controller type делает этот параметр видимым.
Maximum inverter frequency (Hz) — Максимальная частота инвертора20e3 (значение по умолчанию) | положительная скалярная величинаВерхний предел для частоты инвертора, в Гц.
Vector-control sampling time (s) — Время выборки векторного управления 20e-6 (значение по умолчанию) | положительная скалярная величинаВремя выборки векторного управления, в s. Время выборки должно быть кратным шагу времени симуляции.
Main winding rotor resistance Rr' (Ohms) — Основное извилистое сопротивление ротора4.12 (значение по умолчанию) | положительная скалярная величинаСопротивление ротора для основной обмотки, в Омах.
Выбор FOC для параметра Controller type делает этот параметр видимым.
Main winding rotor leakage inductance Llr' (H) — Основная извилистая индуктивность утечки ротора5.6e-3 (значение по умолчанию) | положительная скалярная величинаИндуктивность утечки ротора для основной обмотки, в H.
Выбор FOC для параметра Controller type делает этот параметр видимым.
Main winding mutual inductance Lms (H) — Основная извилистая взаимная индуктивность0.17 (значение по умолчанию) | положительная скалярная величинаВзаимная индуктивность для основной обмотки, в H.
Выбор FOC для параметра Controller type делает этот параметр видимым.
Main winding stator resistance Rs (Ohms) — Основное извилистое сопротивление статора2.0 (значение по умолчанию) | положительная скалярная величинаСопротивление статора для основной обмотки, в Омах.
Выбор DTC (three-level hysteresis) или DTC (two-level hysteresis) для параметра Controller type делает этот параметр видимым.
Auxiliary winding stator resistance Ra (Ohms) — Вспомогательное извилистое сопротивление статора7.14 (значение по умолчанию) | положительная скалярная величинаСопротивление статора для вспомогательной обмотки, в Омах.
Выбор DTC (three-level hysteresis) или DTC (two-level hysteresis) для параметра Controller type делает этот параметр видимым.
Turn ratio (aux/main) — Поверните отношение1.18 (значение по умолчанию) | положительная скалярная величинаВспомогательное-к-основному извилистое отношение поворота.
Pairs of poles — Количество пар полюса4 (значение по умолчанию) | положительный интегралКоличество машины подпирает пары шестами.
Initial flux (Wb) — Начальный поток0 (значение по умолчанию) | неотрицательный скалярПоток при симуляции запускается в Wb.
Выбор DTC (three-level hysteresis) или DTC (two-level hysteresis) для параметра Controller type делает этот параметр видимым.
