DTC машины индукции
Simscape / Электрический / Управление / Управление Машиной Индукции

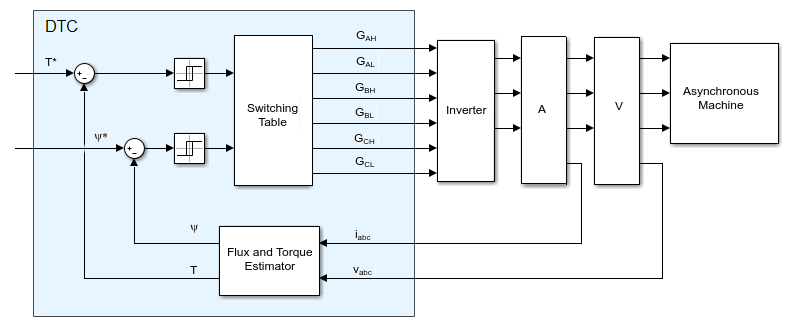
Машина Индукции Прямой Блок управления Крутящего момента реализует структуру прямого управления крутящим моментом (DTC) машины индукции. Данные показывают эквивалентную схему для блока.
Чтобы оценить крутящий момент и поток, Машина Индукции, Прямой Блок управления Крутящего момента дискретизирует уравнения напряжения машины в стационарном кадре ссылки ɑβ с помощью обратного Метода Эйлера. Уравнения дискретного времени для потоков статора в кадре ɑβ:
и
где:
vɑ является ɑ - напряжение оси.
iɑ является ɑ - текущая ось.
Rs является сопротивлением статора.
Ψɑ является ɑ - поток статора оси.
vβ является β - напряжение оси.
iβ является β - текущая ось.
Ψβ является β - поток статора оси.
Блок вычисляет крутящий момент и поток как:
и
где:
p является количеством пар полюса.
Ψs является потоком статора.
Чтобы обнаружить поток и ошибки оценки крутящего момента, блок использует гистерезисные компараторы. Данные показывают гистерезисные компараторы и связанные секторы переключения.
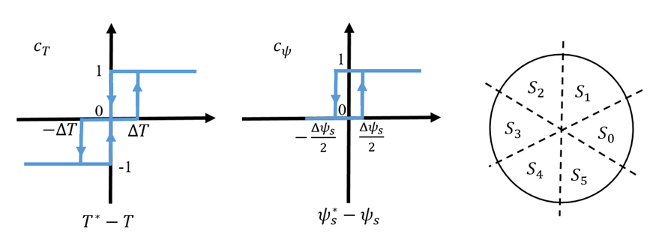
Таблица показывает оптимальное переключение для системы высокой стороны инвертора.
| cΨ, cT S (θ) | S0 | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|---|
| cΨ = 1 | cT = 1 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 |
| cT = 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | |
| cT =-1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | |
| cΨ = 0 | cT = 1 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 |
| cT = 0 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | |
| cT =-1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | |
Потери времени инвертора степени не рассматриваются. Для аппаратной реализации добавьте потерю времени внешне.
[1] Takahashi, я., и Т. Ногучи. "Новая Стратегия управления Быстрого Ответа и Высокой эффективности Асинхронного двигателя". Транзакции IEEE на Промышленных Приложениях. Издание IA-22, Номер 5, 1986, стр 820 - 827.

