Дискретное время основанное на ПИДе адаптивное управление моделью - ссылкой
Simscape / Электрический / Управление / Общее Управление
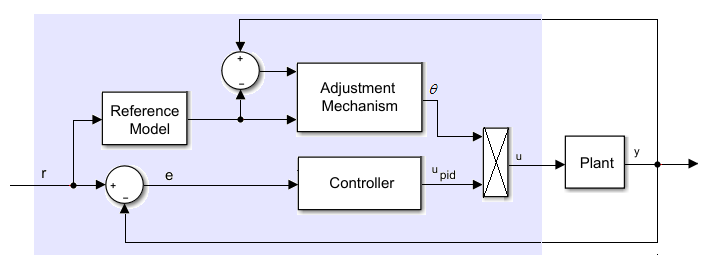
Блок Model Reference Adaptive Controller реализует адаптивное управление моделью - ссылкой (MRAC) пропорциональной интегральной производной (PID) дискретного времени. Три основных компонента системы MRAC являются эталонной моделью, механизмом корректировки и контроллером.
Уравнение управления
где:
upid является вывод контроллера.
Kp является пропорциональным усилением.
Ki является интегральным усилением.
Kd является дифференциальным усилением.
Ts является шагом расчета.
e является ошибкой.
Эталонная модель является передаточной функцией для системы с обратной связью. Эта модель получает желаемое поведение системы с обратной связью. Это реализовано как передаточная функция дискретного времени
Механизм адаптации настраивает действие управления на основе ошибки между объектом вывод и эталонной моделью вывод как
где:
θ является параметром адаптации.
y является объектом вывод.
ym является эталонной моделью вывод.
γ является темпом обучения.
Увеличение значения γ приводит к более быстрой адаптации к изменениям объекта.
Настроенный управляющий сигнал, u,
[1] Дворецкий, H. Адаптивное управление модели - ссылки - от теории до практики. Верхний Сэддл-Ривер, NJ: Prentice Hall, 1992.
