Трехфазная коммутируемая машина нежелания
Simscape / Электрический / Электромеханический / Reluctance & Stepper

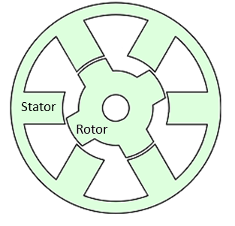
Блок Switched Reluctance Machine представляет трехфазную коммутируемую машину нежелания (SRM). Статор имеет три пары полюса, неся эти три обмотки для электродвигателя, и ротор имеет несколько немагнитных полюсов. Двигатель производит крутящий момент путем подачи питания на пару полюса статора, стимулирования силы на самых близких полюсах ротора и получения по запросу их к выравниванию. Схема показывает моторную конструкцию.
Выберите эту машину в своем приложении, чтобы использовать в своих интересах эти свойства:
Низкая стоимость
Относительно безопасные провальные токи
Робастность к операции высокой температуры
Высокое отношение крутящего момента к инерции
Используйте этот блок, чтобы смоделировать SRM использование легко измеримых или допускающих оценку параметров. Чтобы смоделировать SRM, использующий данные FEM, смотрите Коммутируемый Двигатель Нежелания, Параметризованный с Данными FEM.
Угол штриха ротора для трехфазной машины
где:
θst является топить углом.
Nr является количеством полюсов ротора.
Производственная возможность крутящего момента, β, одного полюса ротора
Математическая модель для коммутируемой машины нежелания (SRM) очень нелинейна из-за влияния магнитного насыщения на потокосцеплении к углу, λ (θph) кривая. Уравнение напряжения фазы для SRM
где:
vph является напряжением на фазу.
Rs является сопротивлением статора на фазу.
iph является током на фазу.
λph является потокосцеплением на фазу.
θph является углом на фазу.
Перезапись уравнения напряжения фазы с точки зрения частных производных приводит к этому уравнению:
Переходная индуктивность задана как
или проще как
Противоэлектродвижущая сила задана как
Замена этими условиями в переписанное уравнение напряжения приводит к этому уравнению напряжения:
Применение co-энергетической формулы к уравнениям для крутящего момента,
и энергия,
приводит к интегральному уравнению, которое задает мгновенный крутящий момент на фазу, то есть,
Интеграция по фазам дает это уравнение, которое задает общий мгновенный крутящий момент для трехфазного SRM:
Уравнение для движения
где:
J является инерцией ротора.
ω является механической скоростью вращения.
T является крутящим моментом ротора. Для блока Switched Reluctance Machine крутящий момент вытекает из случая машины (порт C сохранения блока) к ротору машины (порт R сохранения блока).
TL является крутящим моментом загрузки.
J является инерцией ротора.
Bm является затуханием ротора.
Для высокочастотной разработки моделирования и управления используйте эмпирические данные и вычисление конечного элемента, чтобы определить кривую потокосцепления с точки зрения тока и угла, то есть,
Для моделирования низкого качества можно также аппроксимировать кривую с помощью аналитических методов. Один такой метод [2] использование эта показательная функция:
где:
λsat является влажным потокосцеплением.
f (θr) получен расширением Фурье.
Для расширения Фурье используйте первые два даже термины этого уравнения:
где a> b,
и
Кривая потокосцепления аппроксимирована на основе параметрических и геометрических данных:
где L0 является ненасыщенной индуктивностью.
Эффекты насыщения являются более видными, когда продукт текущей и ненасыщенной индуктивности приближается к влажному значению потокосцепления. Задайте это значение с помощью параметра Saturated flux linkage.
Дифференциация уравнения потока затем дает извилистую индуктивность:
Ненасыщенная индуктивность отличается между минимальным и максимальным значением. Минимальное значение происходит, когда полюс ротора непосредственно между двумя полюсами статора. Максимум происходит, когда полюс ротора выравнивается с полюсом статора. Промежуточный эти две точки, блок аппроксимирует ненасыщенную индуктивность линейно как функцию угла ротора. Эта фигура показывает ненасыщенную индуктивность, когда полюс ротора передает по полюсу статора.
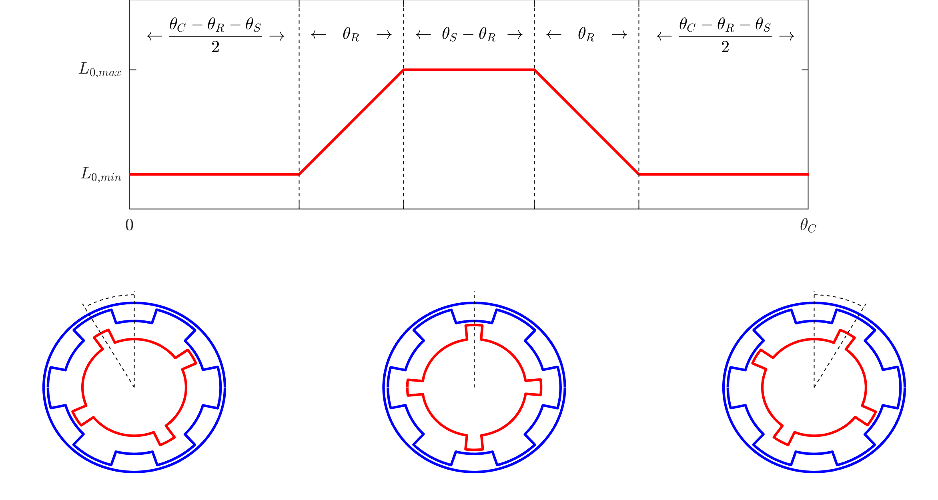
В фигуре:
θR соответствует углу, за которым подухаживает полюс ротора. Установите его с помощью параметра Angle subtended by each rotor pole.
θS соответствует углу, за которым подухаживает полюс статора. Установите его с помощью параметра Angle subtended by each stator pole.
θC соответствует углу, за которым подухаживает этот полный цикл, определенный 2π/2n, где n является количеством пар полюса статора.
Блок обеспечивает четыре варианта моделирования. Чтобы выбрать желаемый вариант, щелкните правой кнопкой по блоку по своей модели. Из контекстного меню выберите Simscape> Block choices, и затем один из этих вариантов:
Composite three-phase ports | No thermal port — Блок содержит составные трехфазные электрические порты сохранения, сопоставленные с обмотками статора, но не содержит тепловые порты. Этот вариант является значением по умолчанию.
Expanded three-phase ports | No thermal port — Блок содержит расширенные электрические порты сохранения, сопоставленные с обмотками статора, но не содержит тепловые порты.
Composite three-phase ports | Show thermal port — Блок содержит составные трехфазные электрические порты сохранения, сопоставленные с обмотками статора и четырьмя тепловыми портами сохранения, один для каждой из этих трех обмоток и один для ротора.
Expanded three-phase ports | Show thermal port — Блок содержит расширенные электрические порты сохранения, сопоставленные с обмотками статора и четырьмя тепловыми портами сохранения, один для каждой из этих трех обмоток и один для ротора.
Используйте тепловые порты, чтобы моделировать эффекты медного сопротивления и железных потерь, которые преобразовывают электроэнергию нагреться. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Переводных Приводах.
Выбор теплового варианта блока представляет тепловые параметры.
На практике магнитные краевые эффекты препятствуют тому, чтобы индуктивность приняла трапециевидную форму, когда полюс ротора передает по полюсу статора. Чтобы смоделировать эти эффекты и избежать разрывов градиента, которые препятствуют сходимости решателя, блок сглаживает градиент ∂L0/∂θ в точках перегиба. Чтобы изменить угол, по которому применяется это сглаживание, используйте параметр Angle over which flux gradient changes are smoothed.
Блок принимает, что нулевой угол ротора соответствует полюсу ротора, который выравнивается отлично с a - фаза.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Основных переменных (Simscape).
[1] Boldea, я. и С. А. Насар. Электроприводы, второй выпуск. Нью-Йорк: CRC, 2005.
[2] Илич '-Spong, M. R. Марино, С. Пересада и Д. Тейлор. “Управление линеаризацией обратной связи коммутируемых двигателей нежелания”. Транзакции IEEE на Автоматическом управлении. Издание 32, № 5, 1987, стр 371–379.
BLDC | PMSM | Синхронная полевая схема машины | Синхронное измерение машины | Синхронная машина нежелания


