Шаговый двигатель с центральными касаниями на двухфазных обмотках
Simscape / Электрический / Электромеханический / Reluctance & Stepper
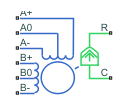
Блок Unipolar Stepper Motor представляет шаговый двигатель, который имеет центральные касания на двух обмотках фазы. Извилистые токи и механический вывод заданы следующими уравнениями:
где:
eA+ является обратной эдс, вызванной через A+ к полуобмотке A0.
eA- является обратной эдс, вызванной через A- к полуобмотке A0.
eB+ является обратной эдс, вызванной через B+ к полуобмотке B0.
eB- является обратной эдс, вызванной через B- к полуобмотке B0.
iA+ является текущим вытекать из порта A+ к порту касания центра A0.
iA- является текущим вытекать из порта A- к порту касания центра A0.
iB+ является текущим вытекать из порта B+ к порту касания центра B0.
iB- является текущим вытекать из порта B- к порту касания центра B0.
vA+ является напряжением в порте A+ относительно порта касания центра A0.
vA- является напряжением в порте A- относительно порта касания центра A0.
vB+ является напряжением в порте B+ относительно порта касания центра B0.
vB- является напряжением в порте B- относительно порта касания центра B0.
Km является моторным постоянным крутящим моментом.
Nr является количеством зубов на каждом из двух полюсов ротора. Параметр Full step size (π/2)/Nr.
R является полусопротивлением обмотки. Например, это - сопротивление между портами A+ и A0.
L является полуизвилистой индуктивностью. Например, это - индуктивность между портами A+ и A0.
R m является сопротивлением намагничивания.
B является вращательным затуханием.
J является инерцией.
ω является скоростью ротора.
Θ является углом ротора.
Td является амплитудой крутящего момента стопора.
Если начальный ротор является нулем или некоторым кратным (π/2)/Nr, ротор выравнивается с обмоткой A-фазы. Если положительные электрические токи от порта A+ до A0 сосредотачивают порт касания, то действия степпера, чтобы остаться выровненными с A-фазой. Эквивалентно, положительное текущее вытекать из порта касания центра A0 к порту A- также действует на ротор, чтобы остаться выровненным с A-фазой.
Блок Unipolar Stepper Motor производит положительный крутящий момент, действующий из механического устройства C к портам R для любой из следующих последовательностей. Обе последовательности принимают, что угол начальной буквы ротора является нулем или некоторым кратным (π/2)/Nr.
| Последовательность | Центральные касания соединяются с землей | Центральные касания соединяются с положительным предоставлением |
|---|---|---|
| 1 | Положительный ток от A+ до A0 | Положительный ток от A0 до A- |
| 2 | Положительный ток от B+ до B0 | Положительный ток от B0 до B- |
| 3 | Положительный ток от A- до A0 | Положительный ток от A0 до A- |
| 4 | Положительный ток от B- до B0 | Положительный ток от B0 до B- |
Если вы устанавливаете параметр Simulation mode на Averaged, и для блока Unipolar Stepper Motor и для Блока драйверов Униполярного тактового двигателя, который управляет им, то отдельные шаги не моделируются. Это может быть хорошим способом ускорить симуляцию. В режиме Averaged, при неуменьшающихся условиях, двигатель и драйвер представлены линейной системой второго порядка, которая отслеживает заданный уровень шага. Потребованный уровень шага определяется непосредственно от напряжения через A+ и A-. Так, например, напряжение +10V через A+ и терминалы A- интерпретировано как спрос на уровень шага десяти шагов в секунду. Смотрите страницу с описанием Драйвера Униполярного тактового двигателя для получения дополнительной информации о том, как соединить Драйвер Униполярного тактового двигателя с вашим угловым контроллером шага.
Усредненный режим включает средство оценки промаха, чтобы предсказать, уменьшился ли шаговый двигатель при выполнении в Шаговом режиме симуляции. Промах предсказан, если моторный крутящий момент превышает значение параметров Vector of maximum torque values для дольше, чем один период шага, период шага, определяемый от текущего спроса на уровень шага. После обнаружения промаха симуляция продолжит или остановится с ошибкой, согласно значению параметров Action on slipping. Если вы выбираете действие, которое позволяет симуляции продолжить, отметить, что результаты симуляции могут быть неправильными: когда скольжение произойдет, крутящий момент, сгенерированный двигателем, обычно не будет максимальным доступным крутящим моментом; максимальный крутящий момент только достигается, если контроллер степпера обнаруживает промах и настраивает команду уровня шага соответственно.
Движущие силы эквивалентной системы второго порядка убеждены от значений, что вы задаете для параметров Maximum step rate command и Approximate total load inertia. Важно, чтобы вы установили максимально точные значения для этих параметров, так, чтобы команда уровня шага была прослежена, и блок не генерирует ложные предупреждения скольжения или ошибки.
Если при запуске двигатель в режиме Averaged с дополнительными тепловыми представленными портами (см. Тепловые Порты), то нагрейтесь, добавляется к тепловым портам, принимающим, что обмотки всегда приводятся в действие, даже когда команда уровня шага является нулем. Блок вносит изменения для того, чтобы наполовину продвинуться и для уменьшаемого крутящего момента (и проветрить токи) на более высоких скоростях. Для этих корректировок, чтобы быть правильными, значения параметров Vector of maximum torque должны быть правильными. Для того, чтобы наполовину продвинуться, на нулевой скорости тепло, выработанное блоком, является средним значением сгенерированного, когда остановлено на половине шага и на полном шаге.
Если вы моделируете или предсказываете промах, MathWorks рекомендует, чтобы вы сделали некоторые выполнения валидации, сравнивающие режимы Stepping и Averaged перед использованием усредненного представления модели для исследований симуляции.
Блок имеет пять дополнительных тепловых портов, один для каждой из этих четырех полуобмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы представить тепловые порты, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают Simscape> Block choices> Show thermal port. Это действие отображает тепловые порты на значке блока и представляет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы моделировать эффекты медного сопротивления и железных потерь, которые преобразовывают электроэнергию нагреться. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Переводных Приводах.
Модель пропускает магнитные эффекты насыщения и любую магнитную связь между фазами.
Когда вы установите флажок Start simulation from steady state в Блоке Configuration Решателя Simscape™, этот блок не инициализирует значение Initial rotor angle между –π и π.
Все четыре полуобмотки приняты, чтобы быть идентичными, и поэтому иметь тот же коэффициент температуры сопротивления, альфу и то же количество тепла.
Чтобы использовать режим Averaged, блок Unipolar Stepper Motor должен быть непосредственно соединен с Блоком драйверов Униполярного тактового двигателя, также запускающимся в режиме Averaged.
Режим Averaged является приближением, и точное отслеживание шага по сравнению с режимом Stepping не должно ожидаться.
Ускользните обнаружение в режиме Averaged является аппроксимированным, и зависит от хорошей оценки для инерции загрузки и максимального уровня шага. Неправильные значения могут привести к ложному обнаружению промаха.
Когда симуляция закрадывается в режим Averaged, она принята, что контроллер шагового двигателя настраивает команду уровня шага, чтобы достигнуть максимального возможного крутящего момента.
Главное электрическое соединение A-фазы
Центр A-фазы касается связи
Более низкое электрическое соединение A-фазы
Главное электрическое соединение B-фазы.
Центр B-фазы касается связи
Более низкое электрическое соединение B-фазы
Механический вращательный порт сохранения
Механический вращательный порт сохранения
Тепловой порт для обмотки между A+ и A0. Для получения дополнительной информации смотрите Тепловые Порты.
Тепловой порт для обмотки между A- и A0. Для получения дополнительной информации смотрите Тепловые Порты.
Тепловой порт для обмотки между B+ и B0. Для получения дополнительной информации смотрите Тепловые Порты.
Тепловой порт для обмотки между B- и B. Для получения дополнительной информации смотрите Тепловые Порты.
Тепловой порт для ротора. Для получения дополнительной информации смотрите Тепловые Порты.
Выберите Stepping или Averaged. Используйте Averaged, только если блок соединяется непосредственно с Блоком драйверов Униполярного тактового двигателя, также запускающимся в режиме Averaged. Значением по умолчанию является Stepping.
Половина сопротивления обмоток фазы A и B, как измерено между A+ и A- и портами B+ и B-. Этот параметр видим, только если Simulation mode установлен в Stepping. Значением по умолчанию является 0.55 Ω.
Половина индуктивности обмоток фазы A и B, как измерено между A+ и A- и портами B+ и B-. Этот параметр видим, только если Simulation mode установлен в Stepping. Значением по умолчанию является 0.0015 H.
Моторный крутящий момент постоянный км. Этот параметр видим, только если Simulation mode установлен в Stepping. Значением по умолчанию является 0.19 N*m/A.
Амплитуда синусоидального изменения крутящего момента наблюдала при вращении вала неприводимого в действие двигателя. Этот параметр видим, только если Simulation mode установлен в Stepping. Значением по умолчанию является 0 N*m.
Общее сопротивление намагничивания, замеченное по каждой из обмоток фазы, например, через A+ и A0. Этот параметр видим, только если Simulation mode установлен в Stepping. Значение должно быть больше, чем нуль. Значением по умолчанию является Inf, который подразумевает, что нет никаких железных потерь.
Вектор скоростей вращения, в которых можно задать максимум, закручивает значения для прогноза промаха. Этот параметр видим, только если Simulation mode установлен в Averaged. Значение по умолчанию является об/мин [0 1000 3000].
Вектор максимальных значений крутящего момента, чтобы использоваться для прогноза промаха в сочетании с параметром Vector of rotational speeds. Максимальные значения крутящего момента часто даются на таблице данных и должны соответствовать напряжению предоставления и шаговому типу (половина шага или полного шага) заданный в драйвере. Этот параметр видим, только если Simulation mode установлен в Averaged. Значением по умолчанию является [2 2 1] N*m.
Выберите действие для блока, чтобы выполнить во время симуляции после обнаружения промаха:
'none' Продолжите симуляцию, ограничив крутящий момент загрузки согласно Vector of maximum torque values.
warn — Продолжите симуляцию, ограничив крутящий момент загрузки согласно Vector of maximum torque values, и сгенерируйте предупреждение, что ротор уменьшается.
ошибка Остановите симуляцию и сгенерируйте сообщение об ошибке, что ротор уменьшается.
Обратите внимание на то, что, если вы выбираете действие, которое позволяет симуляции продолжиться, результаты симуляции могут быть неправильными: когда скольжение произойдет, крутящий момент, сгенерированный двигателем, обычно не будет максимальным доступным крутящим моментом; максимальный крутящий момент только достигается, если контроллер степпера обнаруживает промах и настраивает команду уровня шага соответственно.
Этот параметр видим, только если Simulation mode установлен в Averaged.
Аппроксимированная инерция полной нагрузки, включая инерцию ротора. Это значение используется, чтобы помочь предсказать, когда скольжение произойдет из-за быстрых ускоряющих требований. Этот параметр видим, только если Simulation mode установлен в Averaged. Значением по умолчанию является 1e-4 kg*m^2.
Максимальный уровень шага, которым будет управлять ваша система. Это используется, чтобы определить подходящую пропускную способность для системного приближения второго порядка к шаговому двигателю и драйверу. Этот параметр видим, только если Simulation mode установлен в Averaged. Значение по умолчанию является Гц 10.
Размер шага при изменении полярности любого текущая фаза A или B. Значение по умолчанию является ° 1.8.
Сопротивление ротора, чтобы измениться в моторном движении. Значение по умолчанию является 4.5e-05 kg*m2. Значение может быть нулем.
Энергия рассеивается ротором. Значением по умолчанию является 8e-04 N*m / (rad/s). Значение может быть нулем.
Скорость ротора в начале симуляции. Значение по умолчанию является об/мин 0.
Угол ротора в начале симуляции. Значение по умолчанию является радом 0.
Эта вкладка появляется только для блоков с представленными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Параметр α в сопротивлении определения уравнения как функция температуры, как описано в Тепловой Модели для Блоков Привода. Это принято, что все обмотки сделаны из того же материала, и поэтому имеют тот же коэффициент температуры сопротивления. Значение по умолчанию для меди и является 0.00393 1/K.
Температура, для которой заданы моторные параметры. Значением по умолчанию является 25 °C.
Эта вкладка появляется только для блоков с представленными тепловыми портами. Для получения дополнительной информации смотрите Тепловые Порты.
Количество тепла для половины или обмотки A или B. Количество тепла является энергией, требуемой повысить температуру одной степенью. Это принято, что все четыре полуобмотки имеют то же количество тепла. Значением по умолчанию является 100 J/K.
1 4 векторами - строками, задающими температуру этих четырех полуобмоток в начале симуляции. Значением по умолчанию является [ 25 25 25 25 ] °C.
Количество тепла ротора, то есть, энергия, требуемая повысить температуру ротора одной степенью. Значением по умолчанию является 50 J/K.
Температура ротора в начале симуляции. Значением по умолчанию является 25 °C.
Процент сопротивления намагничивания сопоставлен с магнитным путем через ротор. Это определяет, сколько из железного нагревания потерь приписано ротору тепловой порт HR, и сколько приписано четырем извилистым тепловым портам. Значение по умолчанию является % 90.
[1] М. Бодсон, Дж. Н. Чиэссон, Р. Т. Новотнэк и Р. Б. Рековский. “Высокоэффективное нелинейное управление с обратной связью шагового двигателя постоянного магнита”. Транзакции IEEE на технологии систем управления, издании 1, № 1, март 1993.
[2] П. П. Акарнли. Шаговые двигатели: руководство по современной теории и практике. Нью-Йорк: Peregrinus, 1982.
[3] С.Е. Лышевский. Электромеханические системы, электрические машины и прикладная механотроника. CRC, 1999.
Шаговый двигатель | Драйвер униполярного тактового двигателя
