Преобразуйте виртуальные сигналы шины в векторные сигналы путем добавления Шины в Векторные блоки
[destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model)[destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs)[destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs,reportOnly)[destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs,reportOnly,strictOnly)[ ищет модель, исключая любые блоки библиотеки, для сигналов шины, используемых неявно в качестве векторов, и возвращает результаты поиска.destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model)
[ ищет модель, и если destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs)includeLibs является true, включает в поисковые блоки библиотеки для сигналов шины, используемых неявно в качестве векторов.
[ ищет модель, и если destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs,reportOnly)reportOnly установлен в false, то функция вставляет блок Bus to Vector в каждую шину, которая используется в качестве вектора в любом блоке, который это ищет. Вставка заменяет неявное использование шины как вектор с явным преобразованием шины к вектору. Источник и целевые блоки сигнала не изменяются.
Если Simulink.BlockDiagram.addBusToVector добавляет Шину в Векторные блоки к модели или какой-либо библиотеке, функция изменяет сохраненную копию схемы.
Если Simulink.BlockDiagram.addBusToVector изменяет блок библиотеки, изменение влияет на каждый экземпляр того блока в каждой модели, которая пользуется библиотекой.
[ ищет модель, и если destBlocks,busToVectorBlocks,ignoredBlocks]
= Simulink.BlockDiagram.addBusToVector(model,includeLibs,reportOnly,strictOnly)strictOnly является true, функциональные проверки на сигналы входной шины, используемые неявно в качестве векторов, которые поданы в один из этих блоков. Эти блоки не могут взять виртуальные сигналы шины, но они могут принять невиртуальные сигналы шины.
Задержка
Селектор
“()” Присвоение
Векторная конкатенация
Изменение
Переставьте размерности
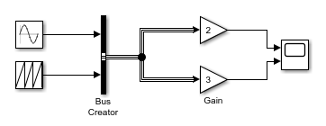
Образцовый ex_bus_to_vector моделирует правильно, но вход к блоку Gain является шиной, в то время как вывод является вектором. Блок Gain неявно преобразовывает шину в вектор.
Откройте модель.
open_system(fullfile(matlabroot,'examples','simulink',... 'ex_bus_to_vector'))
Идентифицируйте шины, обработанные как векторы.
[blocks] = Simulink.BlockDiagram.addBusToVector(... 'ex_bus_to_vector')
### Processing block diagram 'ex_bus_to_vector'
### Number of blocks left that are connected to a bus being used as a vector: 2
### Done processing block diagram 'ex_bus_to_vector'
blocks =
1×2 struct array with fields:
BlockPath
InputPort
LibPathЧтобы понять отношение между Simulink.BlockDiagram.addBusToVector и параметром конфигурации Bus signal treated as vector, смотрите, Управляют Преобразованиями Шины к вектору.
Образцовый ex_bus_to_vector моделирует правильно, но вход к блоку Gain является шиной, в то время как вывод является вектором. Блок Gain неявно преобразовывает шину в вектор.
Откройте модель.
open_system(fullfile(matlabroot,'examples','simulink',... 'ex_bus_to_vector'))
Вставьте Шину в Векторные блоки.
Когда вы используете функциональный Simulink.BlockDiagram.addBusToVector с набором reportOnly к false, функция сохраняет модель. Чтобы создать перезаписываемую копию модели ex_bus_to_vector, этот пример использует функцию save_system.
save_system('ex_bus_to_vector','ex_bus_to_vector_blocks'); [blocks,busToVectors] = Simulink.BlockDiagram.addBusToVector(... 'ex_bus_to_vector_blocks',true,false);
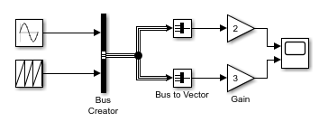
Блок Gain больше неявно преобразовывает шину в вектор. Вставленная Шина к блоку Vector выполняет преобразование явным образом. Блок Bus to Vector является виртуальным и не влияет на результаты симуляции, генерацию кода или производительность.
Чтобы понять отношение между Simulink.BlockDiagram.addBusToVector и параметром конфигурации Bus signal treated as vector, смотрите, Управляют Преобразованиями Шины к вектору.
Прежде чем вы выполните эту функцию:
Гарантируйте, что модель компилирует без ошибки.
Сохраните модель.
Поддержите модель и любые библиотеки прежде, чем вызвать функцию с набором reportOnly к false.
Чтобы предварительно просмотреть эффекты изменения на блоках во всех моделях, вызовите Simulink.BlockDiagram.addBusToVector с набором includeLibs к true и набором reportOnly к true. Затем исследуйте информацию, возвращенную в выходном аргументе destBlocks.
