

Продвиньте пояс передача с плавкой регулировкой с независимым управлением радиусами
Powertrain Blockset / Передача / Системы Передачи

Блок Continuously Variable Transmission реализует передачу с плавкой регулировкой (CVT) пояса нажатия с независимым управлением радиусами. Используйте блок в проекте системы управления, соответствии трансмиссии и исследованиях экономии топлива. Можно сконфигурировать блок для внутреннего контроля или внешнего управления:
Внутренний — Входное направление и запросы отношения шкива
Внешний — Входное направление и запросы смещения шкива
Таблица суммирует кинематический шкив, сокращение скорости и динамические вычисления, сделанные блоком Continuously Variable Transmission.
| Вычисление | Кинематика шкива | Противоположное и итоговое сокращение скорости | Динамика |
|---|---|---|---|
| Итоговое угловое отношение скорости | ✓ | ✓ | ✓ |
| Крутящий момент пояса применился к вторичным и первичным шкивам | ✓ | ||
| Крутящий момент применился к вторичным и первичным шкивам | ✓ | ||
| Скорость вращения вторичных и первичных шкивов | ✓ | ✓ | ✓ |
| Пояс и геометрия шкива | ✓ | ||
| Пояс линейная скорость | ✓ | ||
| Перенесите угол на вторичном и первичном шкиве | ✓ | ||
| Первичные и вторичные радиусы шкива | ✓ |
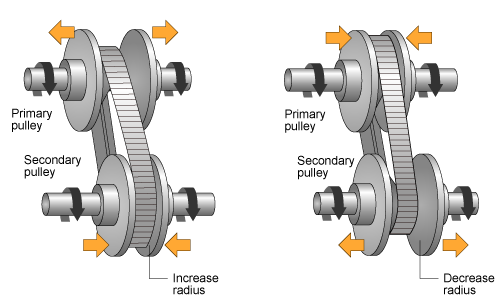
Рисунок показывает вариатор CVT с двумя настройками. В первой настройке, которая иллюстрирует сокращение скорости, вариатор собирается уменьшить первичный радиус шкива и увеличить вторичный радиус шкива. Во второй настройке, которая иллюстрирует перегрузку, вариатор собирается увеличить первичный радиус шкива и уменьшить вторичный радиус шкива.
Используя физические размерности системы, блок вычисляет первичные и вторичные положения вариатора, которые удовлетворяют запросу отношения шкива.
Фигура и уравнения обобщают геометрические зависимости.
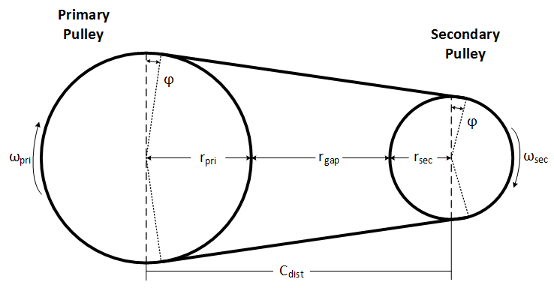
Уравнения используют эти переменные.
| ratiorequest | Запрос передаточного отношения шкива |
| ratiocommand | Команда передаточного отношения шкива, на основе запроса и физических ограничений |
| rgap | Разорвите расстояние между шкивами вариатора |
| Cdist | Расстояние между центрами шкива вариатора |
| rpmax | Максимальный вариатор первичный радиус шкива |
| rsmax | Максимальный вариатор вторичный радиус шкива |
| rpmin | Минимальный вариатор первичный радиус шкива |
| rsmin | Минимальный вариатор вторичный радиус шкива |
| ro | Начальные радиусы шкива с передаточным отношением |
| Lo | Начальная длина пояса, следуя из спецификации вариатора |
| xpri | Вариатор первичное смещение шкива, следуя из запроса контроллера |
| xsec | Вариатор вторичное смещение шкива, следуя из запроса контроллера |
| rpri | Вариатор первичный радиус шкива, следуя из запроса контроллера |
| rsec | Вариатор вторичный радиус шкива, следуя из запроса контроллера |
| Θwedge | Угол клина вариатора |
| Φ | Угол пояса к контактной точке шкива |
| L | Длина пояса, следуя из положения вариатора |
Вал входа CVT соединяется с планетарным набором механизма, который управляет первичным шкивом. Направление сдвига определяет входную инерцию механизма, КПД и передаточное отношение. Направление сдвига является отфильтрованным направлением, которым управляют:
Для движения вперед ():
Для противоположного движения ():
Передаточное отношение и КПД определяют входную скорость карданного вала и закручивают, применился к первичному шкиву:
Блок уменьшает вторичную скорость шкива и примененный крутящий момент с помощью фиксированного передаточного отношения.
Итоговым передаточным отношением, без промаха, дают:
Уравнения используют эти переменные.
| Ni | Введите планетарное передаточное отношение |
| Dir | Команда направления CVT |
| Dirshift | Направление раньше определяло планетарную инерцию, КПД и отношение |
| τs | Постоянная времени сдвига направления |
| ηfwd, ηrev | Вперед и КПД реверсора, соответственно |
| Jfwd, Jrev | Вперед и инерция реверсора, соответственно |
| Nrev | Отношение реверсора |
| Tapp_pri, Tapp_sec | Крутящий момент применился к первичным и вторичным шкивам, соответственно |
| Ti | Введите крутящий момент карданного вала |
| ωi, ωo | Скорость карданного вала ввода и вывода, соответственно |
| ωpri, ωsec | Первичная и вторичная скорость шкива, соответственно |
| Nfinal | Общее передаточное отношение без промахов |
Максимальный крутящий момент, который может передать CVT, зависит от трения между шкивами и поясом. Согласно Прогнозу Предела Фрикционного привода Металлического V-пояса, трение крутящего момента задано как:
Без макро-промаха тангенциальное ускорение шкива принято, чтобы быть равным ускорению пояса. Если крутящий момент достигает статического предела трения, пояс начинает уменьшаться, и шкив и ускорение пояса независимы. Во время промаха крутящий момент, переданный поясом, является функцией кинетического коэффициента трения. Во время перехода от промаха до нескользких условий пояс и тангенциальные скорости шкива равны.
Блок реализует эти уравнения для четырех различных условий промаха.
| Условие | Уравнения |
|---|---|
|
Пояс надевает и вторичные и первичные шкивы |
|
|
Пояс надевает только первичный шкив |
|
|
Пояс надевает только вторичный шкив |
|
|
Пояс не уменьшается |
|
|
Подсуньте направление |
|
Уравнения используют эти переменные.
| TBoP_pri, TBoP_sec | Крутящий момент пояса, действующий на первичные и вторичные шкивы, соответственно |
| Tapp_pri, Tapp_sec | Крутящий момент применился к первичным и вторичным шкивам, соответственно |
| Jpri, Jsec | Первичный и вторичный шкив вращательная инерция, соответственно |
| bpri, bsec | Первичный и вторичный шкив вращательное вязкое затухание, соответственно |
| Fax | Сила зажима шкива |
| μ | Коэффициент трения |
| μkin, μstatic | Коэффициент кинетического и статического трения |
| vb, аb | Линейная скорость и ускорение пояса, соответственно |
| mb | Общая масса пояса |
| rpri, rsec | Радиусы первичных и вторичных шкивов, соответственно |
| Φwrap | Перенесите угол пояса к контактной точке шкива |
| Φwrap_pri, Φwrap_sec | Первичный и вторичный шкив переносит углы, соответственно |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Мощность двигателя | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrBltLoss | Потери мощности промаха пояса | Pbltloss | ||
PwrGearInLoss | Введите планетарную потерю механической энергии механизма | Pgrinloss | |||
PwrGearOutLoss | Выведите потерю механической энергии сокращения механизма | Pgroutloss | |||
PwrDampLoss | Потеря затухания механического устройства | Pdamploss | |||
|
| PwrStoredTrans | Изменение уровня во вращательной кинетической энергии | Pstr | ||
Уравнения используют эти переменные.
| Tapp_pri, Tapp_sec | Крутящий момент применился к первичным и вторичным шкивам, соответственно |
| Ti, To | Крутящий момент карданного вала ввода и вывода, соответственно |
| Jpri, Jsec | Первичный и вторичный шкив вращательная инерция, соответственно |
| bpri, bsec | Первичный и вторичный шкив вращательное вязкое затухание, соответственно |
| ωpri, ωsec | Первичная и вторичная скорость шкива, соответственно |
| ωi, ωo | Скорость карданного вала ввода и вывода, соответственно |
| vb, аb | Линейная скорость и ускорение пояса, соответственно |
| rpri, rsec | Радиусы первичных и вторичных шкивов, соответственно |
Control mode — Внешний или внутреннийIdeal integrated controller (значение по умолчанию) | External controlЗадайте метод управления, или внутренний или внешний.
Эта таблица суммирует порт и ввела настройки модели.
| Режим управления | Создает порты |
|---|---|
Ideal integrated controller |
|
External control |
|
Разрыв между вторичными и первичными шкивами, rgap, в m. Рисунок показывает геометрию шкива.
Угол клина вариатора, Θwedge, в градусе.

Primary pulley inertia, J_pri — ИнерцияscalarПервичная инерция шкива, Jpri, в kg · м^2.
Secondary pulley inertia, J_sec — ИнерцияscalarВторичная инерция шкива, Jsec, в kg · м^2.
Primary pulley damping coefficient, b_pri — ЗатуханиеscalarПервичный коэффициент затухания шкива, bpri, в N · m·.
Secondary pulley damping coefficient, b_sec — ЗатуханиеscalarВторичный коэффициент затухания шкива, bsec, в N · m·.
Belt damping coefficient, b_b — ЗатуханиеscalarКоэффициент затухания пояса, bb, в kg/s.
Static friction coefficient, mu_static — ТрениеscalarСтатический коэффициент трения между поясом и первичным шкивом, μstatic, безразмерным.
Kinetic friction coefficient, mu_kin — ТрениеscalarКинетический коэффициент трения между поясом и первичным шкивом, μkin, безразмерным.
Belt mass, m_b — МассаscalarМасса пояса, mb, в kg.
Pulley clamp force, F_ax — Сила зажима шкиваscalarСила зажима шкива, Fax, в N.
Forward inertia, J_fwd — ИнерцияscalarПередайте инерцию, Jfwd, в kg · м^2.
Reverse inertia, J_rev — ИнерцияscalarПротивоположная инерция, Jrev, в kg · м^2.
Forward efficiency, eta_fwd ЭффективностьscalarПередайте КПД, ηfwd, безразмерный.
Reverse efficiency, eta_rev ЭффективностьscalarПротивоположный КПД, ηrev, безразмерный.
Reverse gear ratio, N_rev — ОтношениеscalarОтношение реверсора, Nrev, безразмерный.
Shift time constant, tau_s — ПостоянныйscalarПереключите постоянную времени, τs, в s.
Output gear ratio, N_o — ОтношениеscalarВыведите передаточное отношение, No, безразмерный.
Output gear efficiency, eta_o ЭффективностьscalarВыведите КПД механизма, ηo, безразмерный.
[1] Ambekar, Ашок Г. Механизм и теория машины. Нью-Дели: Prentice Hall Индии, 2007.
[2] Бонсен, B. Оптимизация КПД CVT пояса нажатия вариатором подсовывает управление. Кандидатская диссертация. Технический университет Эйндховена, 2006.
[3] CVT, как это работает. CVT Новая Зеландия 2 010 Ltd, 10 февраля 2011. Сеть. 25 апреля 2016.
[4] Клаассен, T. W. G. L. CVT Empact: динамика и управление электромеханически приводимого в движение CVT. Кандидатская диссертация. Технический университет Эйндховена, 2007.
[5] Sakagami, K. Прогноз предела фрикционного привода металлического V-пояса. Варрендэйл, PA: международный журнал SAE механизмов 8 (3):1408-1416, 2015.