

Пример готовых узлов электромобиля представляет полную модель электромобиля с моторным генератором, батареей, передачей прямого привода и сопоставленными алгоритмами управления трансмиссии. Используйте пример готовых узлов электромобиля в анализе соответствия трансмиссии и выборе компонента, управлении и диагностическом проекте алгоритма и оборудовании в цикле (HIL) тестирование. Чтобы создать и открыть рабочую копию проекта примера готовых узлов автомобиля с бензиновым двигателем, войти
Пример готовых узлов электромобиля сконфигурирован с сопоставленным двигателем и батареей. Эта схема показывает настройку трансмиссии.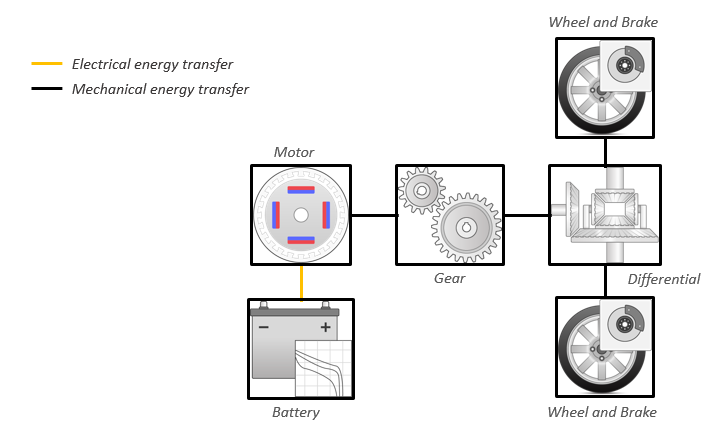
Эта таблица описывает блоки и подсистемы в примере готовых узлов, указывая, какие подсистемы содержат варианты. Чтобы реализовать варианты модели, пример готовых узлов использует различные подсистемы.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Анализируйте степень и энергию |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и потреблении энергии в компоненте - и уровень системы. Для получения дополнительной информации о live скрипте, смотрите, Анализируют Степень и энергию. | Нет данных |
Блок Drive Cycle Source — FTP75 (2 474 секунды) | Генерирует стандартную или заданную пользователями скорость цикла диска по сравнению с профилем времени. Блок выход является выбранным или заданным транспортным средством продольная скорость. | |
Environment подсистема | Создает переменные окружения, включая дорожный класс, скорость ветра, и атмосферную температуру и давление. | |
Longitudinal Driver подсистема |
Использует вариант Longitudinal Driver или Open Loop, чтобы сгенерировать нормированное ускорение и тормозящие команды.
| ✓ |
Controllers подсистема | Реализует управляющий модуль трансмиссии (PCM) с регенеративным торможением, моторным арбитражем крутящего момента и управлением электропитанием. | ✓ |
Passenger Car подсистема | Реализует легковой автомобиль, который содержит электрический объект и подсистемы ходовой части. | ✓ |
Visualization подсистема | Производительность уровня транспортного средства отображений, состояние заряда (SOC) батареи и эквивалентные результаты экономии топлива, которые полезны для соответствия трансмиссии и анализа выбора компонента. |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и потреблении энергии в компоненте - и уровень системы.
Скрипт обеспечивает:
Полные энергетические сводные данные, которые можно экспортировать в электронную таблицу Excel®.
Электрический объект и КПД объекта ходовой части.
Регистрация данных так, чтобы можно было использовать Инспектора Данных моделирования, чтобы анализировать КПД трансмиссии и энергетические сигналы передачи.
Для получения дополнительной информации о live скрипте, смотрите, Анализируют Степень и энергию.
Drive Cycle Source блок генерирует целевую скорость транспортного средства для выбранного или заданного цикла диска. Пример готовых узлов имеет эти опции.
| Синхронизация | Вариант | Описание |
|---|---|---|
Выведите шаг расчета |
| Непрерывные команды оператора |
| Дискретные команды оператора |
Longitudinal Driver подсистема генерирует нормированное ускорение и тормозящие команды. Пример готовых узлов имеет эти варианты.
Блокируйте варианты | Описание | ||
|---|---|---|---|
Продольный драйвер (значение по умолчанию) | Управление |
| Управление PI с отслеживанием завершения и усилений feedforward, которые являются функцией скорости транспортного средства. |
| Оптимальный предварительный просмотр одно точки (предусматривает) управление. | ||
| Управление пропорциональным интегралом (PI) с отслеживанием завершения и усилений feedforward. | ||
Фильтр lowpass (LPF) |
| Используйте LPF при целевой ошибке скорости для более сглаженного управления. | |
| Не используйте фильтр при ошибке скорости. | ||
Сдвиг |
| Модели графика Stateflow®, противоположные, нейтральные, и планирование переключения передач диска. | |
| Введите механизм, состояние транспортного средства, и скоростная обратная связь генерирует ускорение и тормозящие команды, чтобы отследить вперед и инвертировать движение транспортного средства. | ||
| Никакая передача. | ||
| Модели диаграммы Stateflow, противоположные, нейтральные, парк и планирование переключения передач N-скорости. | ||
Разомкнутый цикл | Подсистема регулирования без обратной связи. В подсистеме можно сконфигурировать ускорение, замедление, механизм, и сжать команды с постоянными или основанными на сигнале входными параметрами. | ||
Чтобы определить моторный крутящий момент и команды тормозного давления, пример готовых узлов реализует контрольный контроллер. А именно, подсистема контроллера включает управляющий модуль трансмиссии (PCM) с:
Регенеративное управление торможением
Моторный арбитраж крутящего момента и управление электропитанием
Преобразует сигнал педали акселератора драйвера в запрос крутящего момента.
Преобразует сигнал педали тормоза драйвера в запрос тормозного давления. Алгоритм умножает сигнал педали тормоза на максимальное тормозное давление.
Реализует регенеративный алгоритм торможения для тягового мотора, чтобы восстановить максимальную сумму кинетической энергии от транспортного средства.
Реализует виртуальную систему управления батареи. Алгоритм выводит динамический выброс и пределы степени заряда как функции состояния заряда (SOC) батареи.
Реализует алгоритм управления электропитанием, который гарантирует батарею, динамический выброс и пределы степени заряда не превышены.
Regen, Тормозящий Управление, имеет эти варианты.
| Контроллер | Вариант | Описание |
|---|---|---|
Regen, тормозящий управление | Series Regen Brake (значение по умолчанию) | Торможение трения обеспечивает крутящий момент, не предоставленный регенеративным моторным торможением. |
Parallel Regen Braking | Торможение трения и регенеративное моторное торможение независимо обеспечивают крутящий момент. |
Реализовывать легковой автомобиль, Passenger Car подсистема содержит ходовую часть и электрическую подсистему объекта. Пример готовых узлов имеет эти варианты.
| Подсистема ходовой части | Вариант | Описание | |
|---|---|---|---|
Дифференциал и податливость | All Wheel Drive | Сконфигурируйте ходовую часть для всего колеса, переднего колеса или заднего привода. Для полноприводного варианта можно сконфигурировать тип связывающегося крутящего момента. | |
Front Wheel Drive (значение по умолчанию) | |||
Rear Wheel Drive | |||
Транспортное средство | Vehicle Body 3 DOF Longitudinal | Сконфигурированный для 3 степеней свободы | |
Колеса и тормоза |
| Для колес можно сконфигурировать тип:
Для производительности и ясности, чтобы определить продольную силу каждого колеса, варианты реализуют блок Longitudinal Wheel. Чтобы определить общую продольную силу всех колес, действующих на ось, варианты используют масштабный коэффициент, чтобы умножить силу одного колеса количеством колес на оси. При помощи этого подхода, чтобы вычислить общую силу, варианты принимают равный промах шины и загружающий в передних и задних осях, который характерен для продольных исследований трансмиссии. Если дело обстоит не так, например, когда трение или загрузки расходятся в левых и правых сторонах осей, уникальные Продольные блоки Колеса использования, чтобы вычислить независимые силы. Однако использование уникальных блоков, чтобы смоделировать каждое колесо увеличивает сложность модели и вычислительную стоимость. | |
| |||
| Электрическая подсистема объекта | Вариант | Описание |
|---|---|---|
| Батарея | BattEv (значение по умолчанию) | Сконфигурированный с аккумуляторной батареей |
| Двигатель | MotGenEvMapped (значение по умолчанию) | Сопоставленный двигатель с неявным контроллером |
MotGenEvDynamic | Внутренний постоянный магнит синхронный двигатель (PMSM) с контроллером |
Datasheet Battery | Drive Cycle Source | Interior PM Controller | Interior PMSM | Longitudinal Driver | Mapped Motor