Создайте модель в пространстве состояний с внутренними задержками
sys = setDelayModel(H,tau)
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)
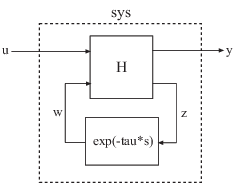
sys = setDelayModel(H,tau)sys полученный соединением LFT модели в пространстве состояний H с вектором внутренних задержек tau, как показано:
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)sys описанный следующими уравнениями:
tau (τ) является вектором внутренних задержек sys.
|
Пространство состояний ( |
|
Вектор внутренних задержек Для моделей непрерывного времени выразите Для моделей дискретного времени выразите |
|
Набор матриц пространства состояний, что, с внутренним вектором задержки |
setDelayModel усовершенствованная операция и не естественный способ создать модели с внутренними задержками. Смотрите Задержки Линейных систем для рекомендуемых способов создать внутренние задержки.
Синтаксис sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau) создает модель непрерывного времени. Можно создать модель дискретного времени, описанную уравнениями пространства состояний
Для этого первое построение sys использование sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau). Затем используйте sys.Ts установить шаг расчета.
