Пакет: TuningGoal
Требование подавления помех для настройки системы управления
Используйте TuningGoal.Rejection задавать минимальное затухание воздействия, введенного в заданном местоположении в системе управления. Эта настраивающая цель помогает вам настроить системы управления с настраивающимися командами, такими как systune или looptune.
Когда вы используете TuningGoal.Rejection, программное обеспечение пытается настроить систему так, чтобы затухание воздействия в заданном местоположении превысило минимальный фактор затухания, который вы задаете. Этот фактор затухания является отношением между открытым - и чувствительностью с обратной связью к воздействию и является функцией частоты. Можно достигнуть затухания воздействия только в пропускной способности управления. Усиление цикла должно быть больше, чем одно для воздействия, которое будет ослаблено (фактор затухания> 1).
Req =
TuningGoal.Rejection(distloc,attfact)distloc. Эта настраивающая цель ограничивает минимальный фактор затухания воздействия к зависимому частотой значению, attfact.
|
Местоположение воздействия, заданное как вектор символов или, для нескольких - входные настраивающие цели, массив ячеек из символьных векторов.
|
|
Фактор затухания как функция частоты, заданной как числовая модель LTI.
attfact = frd([100 100 1 1],[0 1 10 100]);
Req = TuningGoal.Rejection('u',attfact);
bodemag(attfact)
ylim([-5,40])
Когда вы используете Если вы настраиваетесь в дискретное время (то есть, с помощью |
|
Минимальное затухание воздействия как функция частоты, выраженной как Программное обеспечение автоматически сопоставляет |
|
Диапазон частот, в котором осуществляется настройка цели, задал как вектор-строка из формы Установите Req.Focus = [1,100]; Значение по умолчанию: |
|
Переключитесь для того, чтобы автоматически масштабировать сигналы цикла, заданные как Для многоконтурного или настраивающих целей подавления помех MIMO, каналы обратной связи автоматически повторно масштабируются, чтобы компенсировать недиагональное (взаимодействие цикла) условия в передаточной функции разомкнутого цикла. Установите Значение по умолчанию: |
|
Местоположение воздействия, заданного как заданное как массив ячеек из символьных векторов, которые идентифицируют одну или несколько аналитических точек в системе управления, чтобы настроиться. Например, если Начальное значение |
|
Модели, к которым настраивающаяся цель применяется, заданный как вектор индексов. Используйте Req.Models = 2:4; Когда Значение по умолчанию: |
|
Обратная связь, чтобы открыться при оценке настраивающейся цели, заданной как массив ячеек из символьных векторов, которые идентифицируют открывающие цикл местоположения. Настраивающаяся цель оценена против настройки разомкнутого цикла, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Если вы используете настраивающуюся цель настроить модель Simulink системы управления, то Если вы используете настраивающуюся цель настроить обобщенное пространство состояний ( Например, если Значение по умолчанию: |
|
Имя настраивающейся цели, заданной как вектор символов. Например, если Req.Name = 'LoopReq'; Значение по умолчанию: |
Создайте настраивающуюся цель, которая осуществляет затухание, по крайней мере, фактора 10 между 0 и 5 рад/с. Настраивающаяся цель применяется к воздействию, вводящему систему управления в точке, идентифицированной как 'u'.
Req = TuningGoal.Rejection('u',10);
Req.Name = 'Rejection spec';
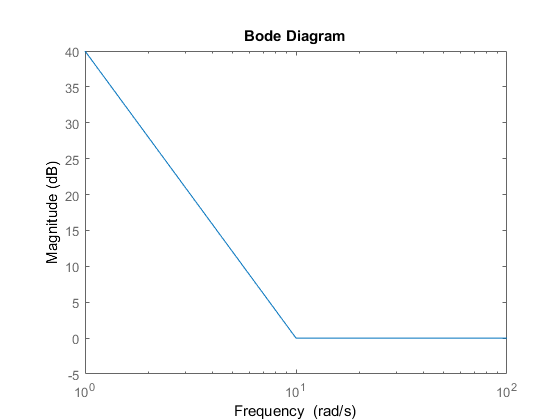
Req.Focus = [0 5]Создайте настраивающуюся цель, которая осуществляет фактор затухания по крайней мере 100 на 40 дБ ниже 1 рад/с, постепенно спадая до 1 прошлого 10 рад/с (на 0 дБ). Настраивающаяся цель применяется к воздействию, вводящему систему управления в точке, идентифицированной как 'u'.
attfact = frd([100 100 1 1],[0 1 10 100]);
Req = TuningGoal.Rejection('u',attfact);Эти команды используют frd модель, чтобы задать минимальное затухание профилирует как функция частоты. Минимальное затухание 100 ниже 1 рад/с, вместе с минимальным затуханием 1 на частотах 10 и 100 рад/с, задает желаемый спад.
attfact преобразован в сглаженную функцию частоты, которая аппроксимирует кусочный заданный профиль. Отобразите профиль усиления с помощью viewGoal.
viewGoal(Req)

Теневая область указывает, где настраивающаяся цель нарушена.
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцененный с циклами, открытыми в точках, идентифицирован в Openings. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. MinDecay и MaxRadius опции systuneOptions управляйте границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, используйте systuneOptions изменить эти значения по умолчанию.
Когда вы настраиваете систему управления с помощью TuningGoal, программное обеспечение преобразует настраивающуюся цель в нормированное скалярное значение f (x). В этом случае x является вектором свободных (настраиваемых) параметров в системе управления. Значения параметров настроены автоматически, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для TuningGoal.Rejection, f (x) дают:
или его эквивалентное дискретное время. Здесь, S (jω, x) является функцией чувствительности с обратной связью, измеренной в местоположении воздействия. Ω является интервалом частоты, на котором настраивающаяся цель осуществлена, задана в Focus свойство. WS является функцией взвешивания частоты, выведенной из заданного профиля затухания. Усиления WS и MinAttenuation примерно соответствуйте для значений усиления в пределах от-20 дБ к 60 дБ. По числовым причинам функция взвешивания выравнивается вне этой области значений, если заданный профиль затухания не изменяет наклон вне этой области значений. Эта корректировка называется regularization. Поскольку полюса WS близко к s = 0 или s = Inf может привести к плохому числовому созданию условий systune задача оптимизации, не рекомендуется задать профили затухания с очень низкочастотной или очень высокочастотной динамикой.
Чтобы получить WS, используйте:
WS = getWeight(Req,Ts)
где Req настраивающаяся цель и Ts шаг расчета, в котором вы настраиваетесь (Ts = 0 в течение непрерывного времени). Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
TuningGoal.LoopShape | TuningGoal.Tracking | looptune | looptune (for slTuner) | slTuner | systune | systune (for slTuner) | viewGoal