Настройте обратную связь фиксированной структуры
[G,C,gam]
= looptune(G0,C0,wc)
[G,C,gam]
= looptune(G0,C0,wc,Req1,...,ReqN)
[G,C,gam]
= looptune(...,options)
[G,C,gam,info]
= looptune(...)
[ настраивает обратную связьG,C,gam]
= looptune(G0,C0,wc)
удовлетворять следующие требования по умолчанию:
Пропускная способность — Усиление перекрестно соединяет для каждого цикла падения интервала частоты wc
Производительность — Интегральное действие на частотах ниже wc
Робастность — Соответствующие запасы устойчивости и спад усиления на частотах выше wc
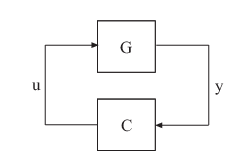
Настраиваемый genss модель C0 задает структуру контроллера, параметры и начальные значения. Модель G0 задает объект. G0 может быть модель Numeric LTI, или, для co-настройки объект и контроллер, настраиваемый genss модель. Датчик сигнализирует о y (измерения) и привод сигнализируют о u (средства управления) задают контур между объектом и контроллером.
Для настройки моделей Simulink® с looptune, используйте slTuner создать интерфейс к вашей модели Simulink. Можно затем настроить систему управления с looptune для slTuner (требует Simulink Control Design™).
[ настраивает обратную связь, чтобы встретиться, дополнительные конструктивные требования, заданные в одной или нескольких настраивающихся целях, возражает G,C,gam]
= looptune(G0,C0,wc,Req1,...,ReqN)Req1,...,ReqN. Не используйте wc использовать требования, заданные в Req1,...,ReqN вместо явной целевой частоты среза и производительности по умолчанию и требований робастности.
[ задает дальнейшие опции, включая целевой запас по амплитуде, целевой запас по фазе и вычислительные опции для настраивающегося алгоритма.G,C,gam]
= looptune(...,options)
[ возвращает структуру G,C,gam,info]
= looptune(...)info с дополнительной информацией о настроенном результате. Используйте info с loopview команда, чтобы визуализировать настраивающиеся ограничения и подтвердить настроенный проект.
|
Числовая модель LTI или настраиваемый Объект является фрагментом вашей системы управления, выходные параметры которой являются сигналами датчика (измерения) и чьи входные параметры являются сигналами привода (средства управления). Используйте |
|
Обобщенная модель LTI, представляющая контроллер. Контроллер является фрагментом вашей системы управления, которая получает сигналы датчика (измерения) как входные параметры и производит сигналы привода (средства управления) как выходные параметры. Используйте модели Control Design Blocks и Generalized LTI, чтобы представлять настраиваемые компоненты контроллера. Используйте |
|
Вектор, задающий цель, перекрестно соединяет область Скалярный |
|
Один или несколько |
|
Набор опций для |
|
Настроенный объект. Если Если | ||||||
|
Настроенный контроллер. | ||||||
|
Уровень успеха указания параметра на встрече всех настраивающих ограничений. Значение Для лучших результатов используйте | ||||||
|
Данные для проверки настраивающихся результатов, возвращенных как структура. Использовать данные в
|
Настройте систему управления следующим рисунком, чтобы достигнуть перекрестного соединения между 0,1 и 1 рад/min.
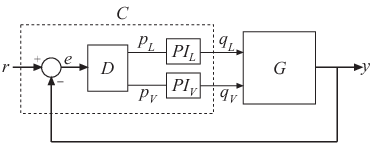
Объект 2 на 2 G представлен:
Контроллер фиксированной структуры, C, включает три компонента: разъединяющийся матричный D 2 на 2 и два ПИ-контроллера PI_L и PI_V. Сигналы rY, и e сигналы с векторным знаком размерности 2.
Создайте числовую модель, которая представляет объект и настраиваемую модель, которая представляет контроллер. Назовите все вводы и выводы как в схеме, так, чтобы looptune знает, как соединить объект и контроллер через сигналы управления и измерения.
s = tf('s');
G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6];
G.InputName = {'qL','qV'};
G.OutputName = 'y';
D = tunableGain('Decoupler',eye(2));
D.InputName = 'e';
D.OutputName = {'pL','pV'};
PI_L = tunablePID('PI_L','pi');
PI_L.InputName = 'pL';
PI_L.OutputName = 'qL';
PI_V = tunablePID('PI_V','pi');
PI_V.InputName = 'pV';
PI_V.OutputName = 'qV';
sum1 = sumblk('e = r - y',2);
C0 = connect(PI_L,PI_V,D,sum1,{'r','y'},{'qL','qV'});
wc = [0.1,1];
[G,C,gam,info] = looptune(G,C0,wc);C настроенный контроллер, в этом случае genss модель с теми же типами блока как C0.
Можно исследовать настроенный результат с помощью loopview.
looptune автоматически преобразует целевую пропускную способность, требования к производительности и дополнительные конструктивные требования в функции взвешивания, которые выражают требования как задачу оптимизации H∞. looptune затем использование systune оптимизировать настраиваемые параметры, чтобы минимизировать норму H∞. Для получения дополнительной информации об алгоритмах оптимизации, см. [1].
looptune вычисляет норму H∞ с помощью алгоритма [2] и сохранение структуры eigensolvers от библиотеки SLICOT. Для получения дополнительной информации о библиотеке SLICOT, см. http://slicot.org.
Для настройки моделей Simulink с looptune, смотрите slTuner и looptune (требует Simulink Control Design).
[1] П. Апкэриэн и Д. Нолл, "Несглаженный Синтез H-бесконечности". Транзакции IEEE на Автоматическом управлении, Издании 51, Номере 1, 2006, стр 71–86.
[2] Bruisma, Н.Э. и М. Стейнбач, "Алгоритм FAST, чтобы Вычислить -норму H Матрицы Передаточной функции", Системные Буквы Управления, 14 (1990), стр 287-293.
TuningGoal.Gain | TuningGoal.LoopShape | TuningGoal.Tracking | connect | diskmargin | genss | hinfstruct | looptune (for slTuner) | looptuneOptions | loopview | slTuner | systune
