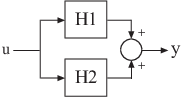
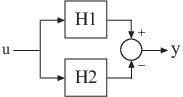
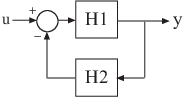
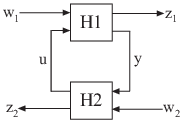
Каждый тип связи блок-схемы соответствует команде соединения моделей или арифметическому выражению. Следующие таблицы обобщают связи блок-схемы с соответствующей соединительной командой и арифметическим выражением.
Можно применить почти все арифметические операции к моделям динамической системы, включая показанных ниже.
|
Операция |
Описание |
|---|---|
+ |
Сложение |
|
|
Вычитание |
|
|
Умножение |
|
|
Поэлементно умножение |
|
|
Правильное матричное деление |
|
|
Оставленное матричное деление |
|
|
Матричная инверсия |
|
| Сопряженное перемещение. Смотрите |
|
|
Перемещение |
|
|
Полномочия модели динамической системы, как в следующем синтаксисе для создания передаточных функций: s = tf('s');
G = 25/(s^2 + 10*s + 25); |
В некоторых случаях вы можете получить лучшие результаты с помощью команд соединения моделей, таких как feedback или connect, вместо арифметики модели. Например, команда T = feedback(H1,H2) возвращает лучшие результаты, чем алгебраическое выражение T = H1/(1+H2*H1). Последнее выражение копирует полюса H1, который увеличивает порядок модели и может привести к вычислительной погрешности.
connect | feedback | parallel | series