Cоединение обратной связи многих моделей
sys = feedback(sys1,sys2)sys для соединения отрицательной обратной связи объектов модели sys1,sys2.
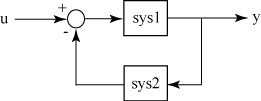
От фигуры, модели sys с обратной связью имеет u как входной вектор и y как выходной вектор. Обе модели, sys1 и sys2, должно или быть непрерывным или дискретным с идентичными шагами расчета.
sys = feedback(___,sign)sys для обратной связи с типом обратной связи, заданной sign. По умолчанию, feedback принимает отрицательную обратную связь и эквивалентен feedback(sys1,sys2,-1). Чтобы вычислить систему с обратной связью с положительной обратной связью, используйте sign = +1.
pendulumModelAndController.mat содержит инвертированную модель G передаточной функции маятника SISO и его связанный ПИД-регулятор C.

Загрузите инвертированный маятник и модели контроллеров к рабочей области.
load('pendulumModelAndController','G','C'); size(G)
Transfer function with 1 outputs and 1 inputs.
size(C)
PID controller with 1 output and 1 input.
Используйте feedback создать цикл отрицательной обратной связи с G и C.
sys = feedback(G*C,-1)
sys =
1.307e-06 s^3 + 3.136e-05 s^2 + 5.227e-06 s
---------------------------------------------------------
2.3e-06 s^4 - 8.886e-07 s^3 - 0.0001031 s^2 - 1.547e-05 s
Continuous-time transfer function.
sys результирующая передаточная функция непрерывного времени замкнутого цикла, полученная с помощью отрицательной обратной связи. feedback преобразует модель C ПИД-регулятора в передаточную функцию прежде, чем соединить его с моделью G передаточной функции непрерывного времени. Для получения дополнительной информации см. Правила, Которые Определяют Тип модели.
В данном примере рассмотрите две передаточных функции, которые описывают объект G и контроллер C соответственно.

Создайте передаточные функции контроллера и объект.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Используйте feedback создать цикл отрицательной обратной связи с помощью G и C.
sys = feedback(G,C,-1)
sys = From input "torque" to output "velocity": 2 s^3 + 25 s^2 + 51 s + 10 --------------------------- 11 s^3 + 57 s^2 + 78 s + 40 Continuous-time transfer function.
sys результирующая передаточная функция замкнутого цикла, полученная с помощью отрицательной обратной связи с крутящим моментом как вход и скорость как выход.
В данном примере рассмотрите две передаточных функции, которые описывают объект G и контроллер C соответственно.

Создайте передаточные функции контроллера и объект.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Используйте feedback создать цикл положительной обратной связи с помощью G и C.
sys = feedback(G,C,+1)
sys = From input "torque" to output "velocity": -2 s^3 - 25 s^2 - 51 s - 10 --------------------------- 9 s^3 + 33 s^2 + 32 s - 20 Continuous-time transfer function.
sys результирующая передаточная функция замкнутого цикла, полученная с помощью положительной обратной связи с крутящим моментом как вход и скорость как выход.
На основе фигуры ниже, рассмотрите соединение двух передаточных функций MIMO с двумя входными параметрами и двумя выходными параметрами в цикле отрицательной обратной связи.

В данном примере создайте две случайных непрерывных модели в пространстве состояний с помощью rss.
G = rss(4,2,2); C = rss(2,2,2); size(G)
State-space model with 2 outputs, 2 inputs, and 4 states.
size(C)
State-space model with 2 outputs, 2 inputs, and 2 states.
Используйте feedback соединять эти две модели в пространстве состояний в цикле отрицательной обратной связи согласно вышеупомянутой фигуре.
sys = feedback(G,C,-1); size(sys)
State-space model with 2 outputs, 2 inputs, and 6 states.
Получившаяся модель в пространстве состояний sys 2 входа, 2 выходных модели с 6 состояниями. Цикл отрицательной обратной связи завершается таким образом что,
Первый выход G соединяется с первым входом C
Второй выход G соединяется со вторым входом C
mimoPlantAndController.mat содержит 2 входа, 2 выходных модели объекта управления передаточной функции G и 2 входа, 2 выходных моделей контроллеров передаточной функции C быть соединенным можно следующим образом:

Во-первых, загрузите объект и модели контроллеров к рабочей области.
load('mimoPlantAndController.mat','G','C'); size(G)
Transfer function with 2 outputs and 2 inputs.
size(C)
Transfer function with 2 outputs and 2 inputs.
По умолчанию, feedback соединил бы первый выход G к первому входу C и второй выход G к второму входу C. Для того, чтобы соединить объект и контроллер согласно фигуре, назовите соответствующий I/Os этих двух систем, чтобы гарантировать правильные связи.
G.InputName
ans = 2x1 cell array
{'torque'}
{'angle' }
G.OutputName
ans = 2x1 cell array
{'velocity'}
{'force' }
C.InputName
ans = 2x1 cell array
{'force' }
{'velocity'}
C.OutputName
ans = 2x1 cell array
{'angle' }
{'torque'}
Затем используйте 'name' отметьте с помощью feedback команда, чтобы установить связи согласно именам ввода-вывода.
sys = feedback(G,C,'name');Получившаяся передаточная функция отрицательной обратной связи замкнутого цикла sys имеет связи обратной связи в необходимом порядке.
Считайте объект пространства состояний G с пятью входными параметрами и четырьмя выходными параметрами и контроллером обратной связи пространства состояний K с тремя входными параметрами и двумя выходными параметрами. Выходные параметры 1, 3, и 4 из объекта G должен быть подключен контроллер K входные параметры и контроллер выходные параметры к входным параметрам 4 и 2 из объекта.

В данном примере сгенерируйте рандомизированные модели в пространстве состояний непрерывного времени с помощью rss для обоих G и K.
G = rss(3,4,5); K = rss(3,2,3);
Задайте feedout и feedin векторы на основе вводов и выводов, которые будут соединены в обратной связи.
feedin = [4 2]; feedout = [1 3 4]; sys = feedback(G,K,feedin,feedout,-1); size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys результирующая модель в пространстве состояний замкнутого цикла, полученная путем соединения заданных вводов и выводов G и K.
sys1,sys2 — Системы, чтобы соединиться в обратной связиСистемы, чтобы соединиться в обратной связи, заданной как модели динамической системы. Динамические системы, которые можно использовать, включают:
Непрерывное время или дискретное время числовые модели LTI, такие как tf, zpk, pid, pidstd, или ss модели.
Обобщенные или неопределенные модели LTI, такие как genss или uss модели. (Используя неопределенные модели требует программного обеспечения Robust Control Toolbox™.)
Получившаяся обратная связь принимает
текущие значения настраиваемых компонентов для настраиваемых блоков системы управления.
номинальные значения модели для неопределенных блоков системы управления.
Для получения дополнительной информации см. модели динамической системы.
Когда sys1 и sys2 два различных типа модели, feedback использует правила приоритета, чтобы определить получившуюся модель sys. Например, когда модель в пространстве состояний и передаточная функция соединяются в обратной связи, получившаяся система является моделью в пространстве состояний на основе правил приоритета. Для получения дополнительной информации см. Правила, Которые Определяют Тип модели.
feedin — Подмножество входных параметров, которые будут использоватьсяПодмножество входных параметров, которые будут использоваться, заданные как вектор.
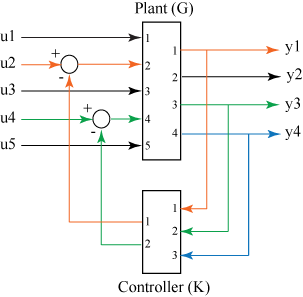
От фигуры, feedin содержит индексы входного вектора объекта MIMO P и задает, какое подмножество входных параметров u вовлечены в обратную связь. Получившаяся модель sys имеет те же входные параметры как G, с их сохраненными порядками.
Для примера смотрите, Задают Связи Ввода и вывода в Обратной связи.
feedout — Подмножество выходных параметров, которые будут использоватьсяПодмножество выходных параметров, которые будут использоваться, заданные как вектор.
feedout задает который выходные параметры объекта MIMO G используются в обратной связи. Получившаяся модель sys имеет те же выходные параметры как G, с их сохраненными порядками.
Для примера смотрите, Задают Связи Ввода и вывода в Обратной связи.
sign — Тип обратной связи+1Тип обратной связи, заданной как -1 для отрицательной обратной связи или +1 для положительной обратной связи. feedback принимает отрицательную обратную связь по умолчанию.
Связь обратной связи должна быть свободна от алгебраических циклов. Например, если D1 и D2 являются проходными матрицами sys1 и sys2, это условие эквивалентно:
I + D1D2, несингулярный при использовании отрицательной обратной связи
I − D1D2, несингулярный при использовании положительной обратной связи
