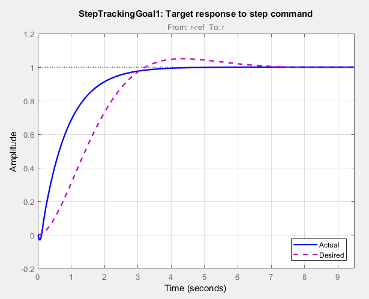
Заставьте переходной процесс от заданных входных параметров до заданных выходных параметров тесно совпадать с целевым ответом, при использовании Control System Tuner.
Цель Отслеживания шага ограничивает переходной процесс между заданными местоположениями сигнала совпадать с переходным процессом устойчивой ссылочной системы. Ограничению удовлетворяют, когда относительная разница между настроенными и целевыми ответами находится в пределах допуска, вы задаете. Можно использовать эту цель ограничить SISO или ответ MIMO системы управления.
Можно задать ссылочную систему для целевого переходного процесса в терминах характеристик системы первого порядка (постоянная времени) или характеристики системы второго порядка (собственная частота и перерегулирование процента). В качестве альтернативы можно задать пользовательскую ссылочную систему как числовую модель LTI.
Во вкладке Tuning Control System Tuner выберите New Goal> Tracking of step commands, чтобы создать Цель Отслеживания Шага.
При настройке систем управления в командной строке используйте TuningGoal.StepTracking задавать цель переходного процесса.
Используйте этот раздел диалогового окна, чтобы задать вход, выведите, и открывающие цикл местоположения для оценки настраивающейся цели.
Specify step-response inputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно применить вход шага. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить переходной процесс от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'u'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Specify step-response outputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно измерить ответ на вход шага. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить переходной процесс от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком. Для систем MIMO количество выходных параметров должно равняться количеству выходных параметров.
Compute step response with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого цикла, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Чтобы подсветить любой выбранный сигнал в модели Simulink®, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать форму желаемого переходного процесса.
First-order characteristics
Задайте желаемый переходной процесс (эталонная модель Href) как ответ первого порядка с постоянной времени τ:
Введите требуемое значение для τ в текстовом поле Time Constant. Задайте τ в единицах измерения времени вашей модели.
Second-order characteristics
Задайте желаемый переходной процесс как ответ второго порядка с постоянной времени τ и собственная частота 1/τ.
Введите требуемое значение для τ в текстовом поле Time Constant. Задайте τ в единицах измерения времени вашей модели.
Введите целевой процент перерегулирования в текстовое поле Overshoot.
Ссылочная система второго порядка имеет форму:
Ослабляющий постоянный ζ связан с процентом перерегулирования ζ = cos(atan2(pi,-log(overshoot/100))).
Custom reference model
Задайте ссылочную систему для желаемого переходного процесса как модель динамической системы, такая как tf, zpk, или ss модель.
Введите имя эталонной модели в рабочей области MATLAB® в текстовом поле LTI model to match. В качестве альтернативы введите команду, чтобы создать подходящую эталонную модель, такую как tf(1,[1 1.414 1]).
Эталонная модель должна быть устойчивой и должна иметь усиление DC 1 (обнулите установившуюся ошибку). Модель может быть непрерывной или дискретной. Если модель дискретна, она может включать задержки, которые обработаны как полюса в z = 0.
Эталонной моделью может быть MIMO, при условии, что это является квадратным и что его сингулярное значение DC (sigma) 1. Затем количество вводов и выводов эталонной модели должно совпадать с размерностями вводов и выводов, заданных для цели переходного процесса.
Для лучших результатов эталонная модель должна также включать внутренние характеристики системы, такие как нули (отклонение от номинала) "не минимальная фаза".
Если ваши выбранные вводы и выводы задают систему MIMO, и вы применяете систему ссылки SISO, программное обеспечение пытается совпадать с диагональными каналами системы MIMO. В этом случае перекрестные связи имеют тенденцию быть минимизированными.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели переходного процесса.
Keep % mismatch below
Задайте относительную ошибку соответствия между фактическим (настроенным) переходным процессом и целевым переходным процессом. Увеличьте это значение, чтобы ослабить соответствующий допуск. Относительная ошибка соответствия, erel, задана как:
y (t) – yref (t) является несоответствием ответа, и 1 – yref (t) является ошибкой неродного отслеживания целевой модели. обозначает энергию сигнала (2-норма).
Adjust for step amplitude
Для настраивающей цели MIMO, когда выбор модульных результатов в соединении маленьких и больших сигналов в различных каналах ответа, эта опция позволяет вам задавать относительную амплитуду каждой записи во входе шага с векторным знаком. Эта информация используется, чтобы масштабировать недиагональные условия в передаточной функции от ссылки до отслеживания ошибки. Это масштабирование гарантирует, что перекрестные связи измеряются относительно амплитуды каждого ссылочного сигнала.
Например, предположите, что настройка цели является этим выходные параметры 'y1' and 'y2' отследите сигналы ссылки 'r1'and 'r2'. Предположим далее, что вы требуете, чтобы выходные параметры отследили ссылки меньше чем с 10%-й перекрестной связью. Если r1 и r2 имейте сопоставимые амплитуды, затем достаточно сохранить усиления от r1 к y2 и r2 и y1 ниже 0.1. Однако, если r1 в 100 раз больше, чем r2, усиление от r1 к y2 должен быть меньше 0.001, чтобы гарантировать тот r1 изменения y2 меньше чем 10% r2 цель. Чтобы гарантировать этот результат, установите Adjust for step amplitude на Yes. Затем введите [100,1] в текстовом поле Amplitudes of step commands. Выполнение так говорит Control System Tuner учитывать, что первый ссылочный сигнал в 100 раз больше второго ссылочного сигнала.
Значение по умолчанию, No , средние значения никакое масштабирование применяются.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Step Response Goal f (x) дают:
T (s, x) является передаточной функцией с обратной связью между заданными вводами и выводами, оцененными со значениями параметров x. Href (s) является эталонной моделью. erel является относительной погрешностью (см. Опции). обозначает H 2 нормы (см. norm).
Эта настраивающая цель также налагает неявное ограничение устойчивости на передаточную функцию с обратной связью между заданными входными параметрами к выходным параметрам, оцененным с циклами, открытыми в заданных открывающих цикл местоположениях. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
