Получите дорожные контуры
Создайте ведущий сценарий, содержащий кривую дорогу, две дороги подряд и двух агентов: автомобиль и велосипед. Оба агента проходят дорога в течение 60 секунд.
Создайте ведущий объект сценария.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Создайте кривую дорогу с помощью дорожных центральных точек после дуги круга с 800-метровым радиусом. Дуга запускается на уровне 0 °, заканчивается на уровне 90 ° и производится в шаге на 5 °.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
Добавьте две дороги подряд с шириной по умолчанию, с помощью дорожных центральных точек в каждом конце.
roadcenters = [700 0 0; 100 0 0]; road(scenario,roadcenters) roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters)
Получите дорожные контуры.
rbdry = roadBoundaries(scenario);
Добавьте автомобиль и велосипед к сценарию. Расположите автомобиль в начале первой дороги подряд.
car = vehicle(scenario,'Position',[700 0 0],'Length',3,'Width',2,'Height',1.6);
Расположите велосипед дальше в будущем.
bicycle = actor(scenario,'Position',[706 376 0]','Length',2,'Width',0.45,'Height',1.5);
Постройте сценарий.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');

Отобразите положения агента и профили.
poses = actorPoses(scenario)
poses=2×7 struct
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×9 struct
ActorID
ClassID
Length
Width
Height
OriginOffset
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Создайте ведущий сценарий, содержащий дорогу фигуры 8, заданную в мировых координатах сценария. Преобразуйте мировые координаты сценария к системе координат автомобиля, оборудованного датчиком.
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Добавьте дорогу фигуры 8 к сценарию. Отобразите сценарий.
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)
Добавьте автомобиль, оборудованный датчиком в сценарий. Расположите транспортное средство в мировых координатах (20, –20) и ориентируйте его под –15 углами отклонения от курса степени.
ego = actor(scenario,'Position',[20 -20 0],'Yaw',-15);

Получите дорожные контуры в координатах автомобиля, оборудованного датчиком при помощи roadBoundaries функция. Задайте автомобиль, оборудованный датчиком как входной параметр.
rbEgo1 = roadBoundaries(ego);
Отобразите результат на видимом с большого расстояния графике.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)

Получите дорожные контуры в мировых координатах при помощи roadBoundaries функция. Задайте сценарий как входной параметр.
rbScenario = roadBoundaries(scenario);
Получите дорожные контуры в координатах автомобиля, оборудованного датчиком при помощи driving.scenario.roadBoundariesToEgo функция.
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
Отобразите дорожные контуры на видимом с большого расстояния графике.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})

rbdry — Дорожные контурыДорожные контуры, возвращенные как массив ячеек. Каждая ячейка в массиве ячеек содержит N с действительным знаком-by-3 матрица, представляющая дорожный контур в сценарии, где N является количеством дорожных контуров. Каждая строка матрицы соответствует (x, y, z) координаты дорожной граничной вершины.
Когда входной параметр является ведущим сценарием, дорожные координаты относительно мировых координат ведущего сценария. Когда входной параметр является агентом, дорожные координаты относительно системы координат агента.
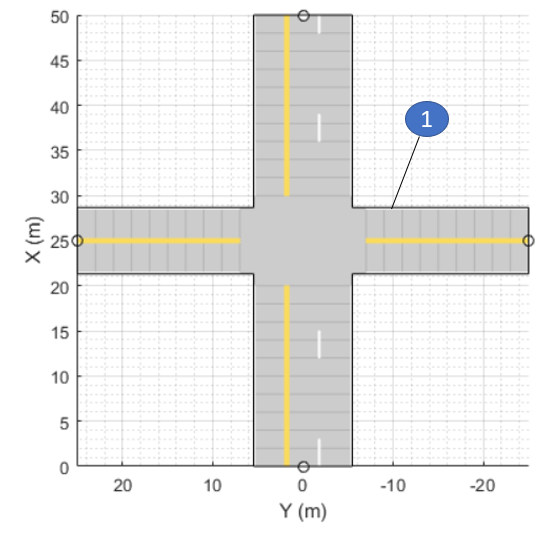
Рисунки показывают количество дорожных контуров что rbdry содержит для различных дорожных типов.
| Сингл-Роуд — Один дорожный контур | Пересечение — Один дорожный контур |
|---|---|
|
|
|
| Кольцо — Туо-Роуд Бундэрис | Рисунок 8 — Три-Роуд Бундэрис |
|---|---|
|
|
|