

Переключите частотную характеристику БИХ-фильтра
[Num,Den,AllpassNum,AllpassDen] =
iirshift(B,A,Wo,Wt)
[Num,Den,AllpassNum,AllpassDen] =
iirshift(B,A,Wo,Wt) возвращает числитель и векторы знаменателя, Num и Den соответственно, целевого фильтра, преобразованного от действительного lowpass, моделируют путем применения действительного отображения частоты сдвига второго порядка.
Это также возвращает числитель, AllpassNum, и знаменатель allpass, сопоставляющего фильтр, AllpassDen. Прототип фильтр lowpass дан с числителем, заданным B и знаменатель задан A.
Это преобразование помещает, тот выбрал функцию исходного фильтра, расположенного на частоте Во к необходимому целевому местоположению частоты, весу. Это преобразование реализует "Мобильность DC", что означает, что функция Найквиста остается в Найквисте, но функция DC перемещается в местоположение, зависящее от выбора Во и веса.
Относительные положения других функций исходного фильтра не изменяются в целевом фильтре. Это означает, что возможно выбрать две функции исходного фильтра, F1 и F2, с F1, предшествующим F2. F1 функции будет все еще предшествовать F2 после преобразования. Однако расстояние между F1 и F2 не будет тем же самым до и после преобразования.
Выбор функции, удовлетворяющей действительному преобразованию сдвига, не ограничивается частотой среза исходного фильтра lowpass. В целом возможно выбрать любую функцию; например, ребро полосы задерживания, DC, глубокий минимум в полосе задерживания или другие единицы.
Это преобразование может также использоваться в преобразовании других типов фильтров; например, фильтры метки или резонаторы могут сменить свое положение простым способом, не проектируя их с начала.
Спроектируйте прототип действительный БИХ-полуленточный фильтр с помощью стандартного эллиптического подхода:
[b, a] = ellip(3, 0.1, 30, 0.409);
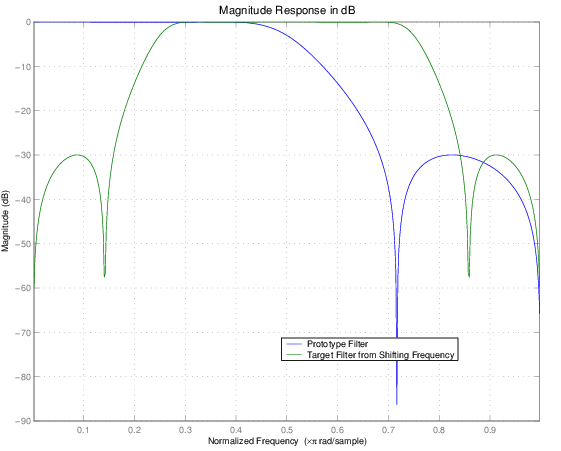
Выполните действительный сдвиг частоты путем определения где выбранная функция прототипного фильтра, первоначально в Wo=0.5, должен быть помещен в целевой фильтр, Wt=0.75:
Wo = 0.5; Wt = 0.75; [num, den] = iirshift(b, a, Wo, Wt);
Проверьте результат путем сравнения прототипного фильтра с целевым фильтром:
fvtool(b, a, num, den);
Сдвиг заданной функции от прототипа до цели генерирует показанный на рисунке ответ.
| Переменная | Описание |
|---|---|
B | Числитель прототипа фильтр lowpass |
A | Знаменатель прототипа фильтр lowpass |
Wo | Значение частоты, которое будет преобразовано от прототипного фильтра |
Wt | Желаемое местоположение частоты в преобразованном целевом фильтре |
Num | Числитель целевого фильтра |
Den | Знаменатель целевого фильтра |
AllpassNum | Числитель фильтра отображения |
AllpassDen | Знаменатель фильтра отображения |
Частоты должны быть нормированы, чтобы быть между 0 и 1 с 1 соответствием половине частоты дискретизации.