Одномерный цифровой фильтр fi объекты
y = filter(b,1,x)
[y,zf]
= filter(b,1,x,zi)
y = filter(b,1,x,zi,dim)
y = filter(b,1,x)x использование фильтра, описанного вектором фиксированной точки b. Функция возвращает отфильтрованные данные в выходе fi объект y. Входные параметры b и x должен быть fi объекты. filter всегда действует по первому неодноэлементному измерению. Таким образом фильтр действует по первому измерению для вектор-столбцов и нетривиальных матриц, и вдоль второго измерения для векторов-строк.
[ предоставляет доступ к начальным и итоговым условиям задержек, y,zf]
= filter(b,1,x,zi) zi, и zfzi вектор продолжительности длины (, или массив с ведущей размерностью b)-1длины размера ( и с остальными измерениями, совпадающими с теми b)-1из xzi должен быть fi объект с совпадающим типом данных как y и zf. Если вы не задаете значение для zi, это принимает значение по умолчанию к массиву фиксированной точки со значением 0 и соответствующий numerictype и размер.
y = filter(b,1,x,zi,dim)[] для входного параметра zi.
|
Вектор фиксированной точки коэффициентов фильтра. |
|
Вектор фиксированной точки, содержащий данные для функции, чтобы отфильтровать. |
|
Вектор фиксированной точки, содержащий начальные условия задержек. Если начальные условия задержек являются нулем, можно задать нуль, или, если вы не знаете соответствующего размера и Если вы не задаете значение для |
|
Размерность, по которой можно выполнить операцию фильтрации. |
|
Выходной вектор, содержащий отфильтрованные данные фиксированной точки. |
|
Выходной вектор фиксированной точки, содержащий итоговые условия задержек. |
Следующий пример фильтрует высокочастотную синусоиду фиксированной точки от сигнала, который содержит и минимум - и высокочастотную синусоиду фиксированной точки.
w1 = .1*pi; w2 = .6*pi; n = 0:999; xd = sin(w1*n) + sin(w2*n); x = sfi(xd,12); b = ufi([.1:.1:1,1-.1:-.1:.1]/4,10); gd = (length(b)-1)/2; y = filter(b,1,x); % Plot results, accommodate for group-delay of filter plot(n(1:end-gd),x(1:end-gd)) hold on plot(n(1:end-gd),y(gd+1:end),'r--') axis([0 50 -2 2]) legend('Unfiltered signal','Filtered signal') xlabel('Sample index (n)') ylabel('Signal value')

Получившийся график показывает обоим неотфильтрованные и отфильтрованные сигналы.
filter функционируйте только поддерживает КИХ-фильтры. В общем представлении фильтра, b/a, знаменатель, a, КИХ-фильтра является скаляром 1, который является вторым входом этой функции.
numerictype из b может отличаться, чем numerictype из x.
Если вы хотите задать начальные условия, но не знаете что numerictype чтобы использовать, сначала попытайтесь фильтровать свои данные без начальных условий. Можно сделать так путем определения [] для входа zi. После выполнения операции фильтрации у вас есть numerictype из y и zf (если требуется). Поскольку numerictype из zi должен совпадать с тем из y и zf, вы теперь знаете numerictype использовать в начальных условиях.
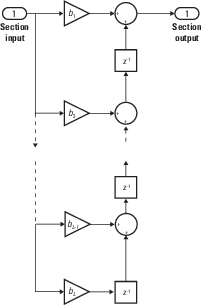
filter функционируйте использует Прямую Форму Транспонированная КИХ-реализация следующего разностного уравнения:
где L длина фильтра и N порядок фильтра.
Следующая схема показывает, что прямая форма транспонировала КИХ-структуру фильтра, используемую filter функция: