Преобразуйте проекции параллельного луча в луч вентилятора
F = para2fan(P,D)P к данным луча вентилятора F. Каждый столбец P содержит выборки датчика параллельного луча при одном угле поворота. D расстояние от вершины луча вентилятора до центра вращения.
Датчики параллельного луча приняты, чтобы иметь интервал на один пиксель. Углы поворота параллельного луча расположены с интервалами одинаково, чтобы покрыть [0,180] степени. Расчетные углы поворота луча вентилятора имеют тот же интервал как углы поворота параллельного луча и покрытие [0,360), степени. Расчетные углы луча вентилятора равномерно распределены с набором интервала к самому маленькому углу, подразумеваемому интервалом датчика.
F = fan2para(P,D,Name,Value)
[ возвращает местоположения датчика луча вентилятора в F,fan_sensor_positions,fan_rotation_angles]
= fan2para(___)fan_sensor_positions и углы поворота в fan_rotation_angles.
Сгенерируйте проекции параллельного луча
ph = phantom(128); theta = 0:180; [P,xp] = radon(ph,theta); imshow(P,[],'XData',theta,'YData',xp,'InitialMagnification','fit') axis normal title('Parallel-Beam Projections') xlabel('\theta (degrees)') ylabel('x''') colormap(gca,hot), colorbar

Преобразуйте в проекции луча вентилятора
[F,Fpos,Fangles] = para2fan(P,100); figure imshow(F,[],'XData',Fangles,'YData',Fpos,'InitialMagnification','fit') axis normal title('Fan-Beam Projections') xlabel('\theta (degrees)') ylabel('Sensor Locations (degrees)') colormap(gca,hot), colorbar

P — Данные о проекции параллельного лучаДанные о проекции параллельного луча, заданные как числовая матрица. Каждый столбец P содержит данные параллельного луча при одном угле поворота. Количество столбцов указывает на количество углов поворота параллельного луча, и количество строк указывает на количество датчиков параллельного луча.
Типы данных: double | single
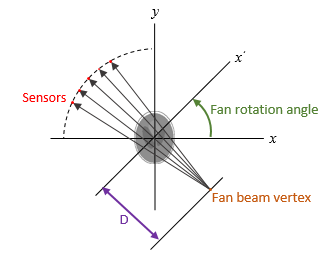
D — Расстояние от поклонника излучает вершину к центру вращенияРасстояние в пикселях от поклонника излучает вершину к центру вращения, заданного как положительное число. para2fan принимает, что центр вращения является центральной точкой проекций, которая задана как ceil(size(F,1)/2). Значение D должен быть больше или быть равен ParallelSensorSpacing* (РАЗМЕР (P, 1)-1)/2
Фигура иллюстрирует D относительно вершины луча вентилятора для одной проекции луча вентилятора.
Типы данных: double | single
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
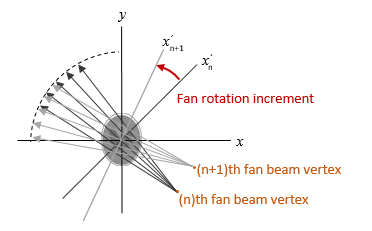
F = para2fan(P,D,'FanRotationIncrement',5)'FanRotationIncrement' — Шаг угла поворота луча вентилятораУгол поворота луча вентилятора постепенно увеличивается в градусах, заданный как разделенная запятой пара, состоящая из 'FanRotationIncrement' и положительная скалярная величина.
Если FanCoverage 'cycle', затем 360/FanRotationIncrement должно быть целое число.
Если вы не задаете FanRotationIncrement, затем значение по умолчанию равно углу поворота параллельного луча.
Типы данных: double
Расположение датчика луча вентилятора, заданное как разделенная запятой пара, состоящая из 'FanSensorGeometry' и одно из следующих значений.
Значение | Значение | Схема |
|---|---|---|
| Датчики расположены с интервалами под равными углами вдоль круговой дуги на расстоянии
| 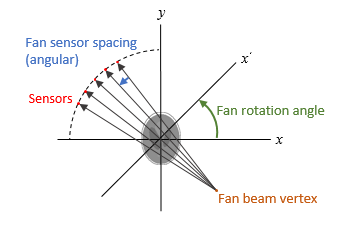 |
| Датчики расположены с интервалами на равных расстояниях вдоль линии, которая параллельна x' ось. Самый близкий датчик является расстоянием
| 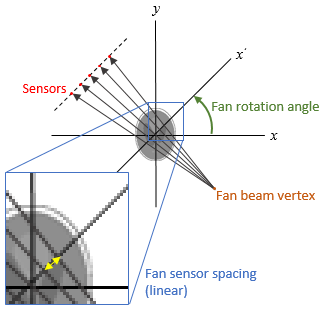 |
'FanSensorSpacing' — Интервал датчика луча вентилятораИнтервал датчика луча вентилятора, заданный как разделенная запятой пара, состоящая из 'FanSensorSpacing' и положительная скалярная величина.
Если FanSensorGeometry 'arc', затем FanSensorSpacing задает угловой интервал в градусах.
Если FanSensorGeometry 'line', затем FanSensorSpacing задает линейное расстояние между лучами вентилятора, в пикселях. Линейный интервал измеряется на x' ось.
Если вы не задаете FanSensorGeometry, затем значение по умолчанию FanSensorSpacing наименьшее значение, подразумеваемое ParallelSensorSpacing таким образом, что:
Если FanSensorGeometry 'arc', затем FanSensorSpacing 180/pi*ASIN (ParallelSensorSpacingD)
Если FanSensorGeometry 'line', затем FanSensorSpacing D*ASIN (ParallelSensorSpacingD)
Типы данных: double
'Interpolation' — Тип интерполяции'Linear' (значение по умолчанию) | 'nearest' | 'spline' | 'pchip'Тип интерполяции используется между параллельным лучом и данными луча вентилятора, заданными как разделенная запятой пара, состоящая из 'Interpolation' и одно из этих значений.
'nearest' nearestNeighbor
'linear' — Линейный (значение по умолчанию)
'spline' — Кусочный кубический сплайн
'pchip' — Кусочный кубический Эрмит (PCHIP)
'ParallelCoverage' — Область значений вращения параллельного луча'halfcycle' (значение по умолчанию) | 'cycleОбласть значений вращения параллельного луча, заданного как разделенная запятой пара, состоящая из 'ParallelCoverage' и одно из этих значений.
'cycle' — Параллельные данные покрывают полный спектр [0, 360), степени.
'halfcycle' — Параллельные покрытия данных [0, 180) степени.
'ParallelSensorSpacing' — Интервал датчика параллельного лучаИнтервал датчика параллельного луча в пикселях, заданных как разделенная запятой пара, состоящая из 'ParallelSensorSpacing' и положительная скалярная величина.
Типы данных: double
