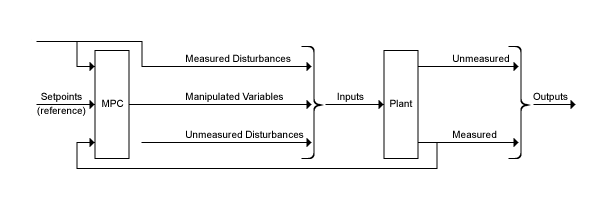
Прогнозирующий диспетчер модели использует линейный объект, воздействие и шумовые модели, чтобы оценить, что диспетчер утверждает и предсказывает будущий объект выходные параметры. Используя предсказанный объект выходные параметры, диспетчер решает задачу оптимизации квадратичного программирования, чтобы определить оптимальные переменные корректировки, которыми управляют. Для получения дополнительной информации о структуре прогнозирующих контроллеров модели смотрите, что MPC Моделирует. Используя ваш объект, воздействие и шумовые модели, можно создать контроллер MPC, использующий приложение MPC Designer или в командной строке. Можно симулировать производительность контроллера в командной строке или в Simulink®.