Радарное сечение усеченного конуса
rcspat = rcstruncone(r1,r2,height,c,fc)r1 радиус маленького конца конуса, r2 радиус большого конца и height коническая высота. Радарное сечение является функцией частоты сигнала, fc, и скорость распространения сигнала, c. Можно создать неусеченный конус установкой r1 обнулять. Конус указывает вниз на xy - плоскость. Источник расположен в вершине неусеченный конус, созданный путем расширения усеченного конуса к вершине.
Отобразите шаблон радарного сечения (RCS) усеченного конуса как функция угла азимута и вертикального изменения. Усеченный конус имеет радиус закругления дна канавки записи 9,0 см и главный радиус 12,5 см. Коническая высота составляет 1 м. Рабочая частота составляет 4,5 ГГц.
Задайте геометрию усеченного конуса и параметры сигнала.
c = physconst('Lightspeed');
fc = 4.5e9;
radbot = 0.090;
radtop = 0.125;
hgt = 1;Вычислите RCS для всех направлений с помощью значений направления по умолчанию.
[rcspat,azresp,elresp] = rcstruncone(radbot,radtop,hgt,c,fc); imagesc(azresp,elresp,pow2db(rcspat)) xlabel('Azimuth Angle (deg)') ylabel('Elevation Angle (deg)') title('Truncated Cone RCS (dB)') colorbar

Постройте шаблон радарного сечения (RCS) усеченного конуса как функция вертикального изменения для фиксированного угла азимута 5 градусов. Конус имеет радиус закругления дна канавки записи 9,0 см и главный радиус 12,5 см. Высота усеченного конуса составляет 1 м. Рабочая частота 4.5.
Задайте геометрию усеченного конуса и параметры сигнала.
c = physconst('Lightspeed');
fc = 4.5e9;
radbot = 0.090;
radtop = 0.125;
hgt = 1;Вычислите RCS под углом азимута 5 градусов.
az = 5.0; el = -90:90; [rcspat,azresp,elresp] = rcstruncone(radbot,radtop,hgt,c,fc,az,el); plot(elresp,pow2db(rcspat)) xlabel('Elevation Angle (deg)') ylabel('RCS (dB)') title('Truncated Cone RCS as Function of Elevation') grid on

Постройте шаблон радарного сечения (RCS) усеченного конуса как функция частоты для одного направления. Конус имеет радиус закругления дна канавки записи 9,0 см и главный радиус 12,5 см. Высота усеченного конуса составляет 1 м.
Задайте геометрию усеченного конуса и параметры сигнала.
c = physconst('Lightspeed');
radbot = 0.090;
radtop = 0.125;
hgt = 1;Вычислите RCS в области значений частот для одного направления.
az = 5.0; el = 20.0; fc = (100:100:4000)*1e6; rcspat = rcstruncone(radbot,radtop,hgt,c,fc,az,el); plot(fc/1e6,pow2db(squeeze(rcspat))) xlabel('Frequency (MHz)') ylabel('RCS (dB)') title('Truncated Cone RCS as Function of Frequency') grid on

Постройте шаблон радарного сечения (RCS) полного конуса как функция вертикального изменения для фиксированного угла азимута. Чтобы задать полный конус обнуляет радиус закругления дна канавки записи. Установите главный радиус на 20,0 см и коническую высоту к 50 см. Примите, что рабочая частота составляет 4,5 ГГц, и угол азимута является 5 градусами.
Задайте коническую геометрию и параметры сигнала.
c = physconst('Lightspeed');
fc = 4.5e9;
radsmall = 0.0;
radlarge = 0.20;
hgt = 0.5;Вычислите RCS для фиксированного угла азимута 5 градусов.
az = 5.0; el = -89:0.1:89; [rcspat,azresp,elresp] = rcstruncone(radsmall,radlarge,hgt,c,fc,az,el); plot(elresp,pow2db(rcspat)) xlabel('Elevation Angle (deg)') ylabel('RCS (db)') title('Full Cone RCS as Function of Elevation') grid on

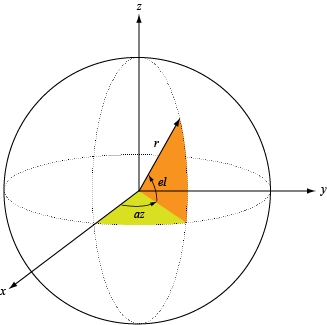
В этом разделе описываются соглашение, используемое, чтобы задать углы вертикального изменения и азимут.
azimuth angle вектора является углом между x - осью и ее ортогональной проекцией на xy - плоскость. Угол положителен при движении от x - оси к y - ось. Углы азимута находятся между степенями на 180 ° и на-180 °, включительно. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - оси от xy - плоскость. Углы вертикального изменения находятся между степенями на 90 ° и на-90 °, включительно.
[1] Mahafza, Bassem. Анализ и проектирование радиолокационных систем Используя MATLAB, 2-го Эда. Бока-Ратон, FL: Chapman & Hall/CRC, 2005.
phased.BackscatterRadarTarget | phased.RadarTarget | rcscylinder | rcsdisc | rcssphere
