Система механической передачи с цепью и двумя звездочками
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок Chain Drive представляет систему механической передачи с цепью и двумя звездочками. Цепь сцепляется со звездочками, передавая вращательное движение между двумя. Механическая передача может произойти наоборот, то есть, от доведенного звездочка драйвера, из-за внешних загрузок. Это условие известно как установку в нужное состояние "обратным путем".
Цепь диска совместима. Это может простираться под силой или ослабить, если свободный. Модель податливости состоит из линейного набора пружинного демпфера в параллельном расположении. Пружина сопротивляется растяжимой деформации в цепи. Демпфер сопротивляется растяжимому движению между цепочечными элементами.
Пружина и силы демпфера действуют непосредственно на звездочки, которые соединяет цепь. Упругая сила присутствует, когда одна цепочечная ветвь является тугой. Сила демпфера присутствует постоянно. Чтобы представлять и сообщить об условии отказа, симуляция останавливает и генерирует ошибку, если сетевая растяжимая сила в цепи превышает заданное максимальное значение силы.
Блок составляет вязкое трение в подшипниках соединения звездочки. Во время движения вязкое трение вызывает потери механической передачи, уменьшая КПД цепного привода. Эти потери соединяют из-за цепочечного затухания. Чтобы устранить потери механической передачи в цепочечном диске, в настройках Dynamic, устанавливают параметры для вязкого трения и затухания цепи, чтобы обнулить.
Растяжимый уровень деформации в цепи является различием между звездочкой тангенциальные скорости, которые являются каждым продукт радиусов подачи и скорости вращения. Математически,
где:
x является растяжимой деформацией.
ωA, ωB является скоростями вращения звездочки.
RA, RB является радиусами подачи звездочки.
Рисунок показывает следующие переменные.
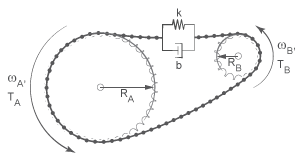
Цепочечная растяжимая сила является сетевой суммой сил демпфера и пружины. Упругая сила является продуктом растяжимой деформации и пружинной постоянной жесткости. Эта сила является нулем, когда растяжимая деформация меньше, чем слабая цепь. Сила демпфера является продуктом растяжимого уровня деформации и коэффициента затухания. Математически,
где:
S является слабой цепью.
k является пружинной постоянной жесткостью.
b является коэффициентом демпфера.
Цепь проявляет крутящий момент на каждой звездочке, равной продукту растяжимой силы и радиуса подачи звездочки. Два крутящих момента действуют в противоположных направлениях согласно уравнениям
и
где:
TA является крутящим моментом, который цепь применяет на звездочку A.
TB является крутящим моментом, который цепь применяет на звездочку B.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
В отличие от параметров блоков, переменные не имеют условной видимости. Вкладка Variables перечисляет все существующие переменные в блоках. Если переменная не используется в системе уравнений, соответствующей выбранной настройке блока, значения, заданные для этой переменной, проигнорированы.
Зубное отношение звездочки равняется отношению радиуса подачи звездочки.
Цепочечная инерция незначительна.

