Реализуйте пятифазовый постоянный магнит синхронный моторный векторный диск управления
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Диски AC
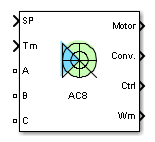
Блок Five-Phase PM Synchronous Motor Drive (AC8) представляет классический векторный диск управления для пятифазового постоянного магнита синхронные двигатели. Этот диск показывает регулировку скорости замкнутого цикла на основе векторного метода управления. Цикл регулировки скорости выводит ссылочный электромагнитный крутящий момент машины. Прямая ссылка и квадратура (dq) компоненты статора текущее соответствие крутящему моменту, которым управляют, выведена на основе векторной стратегии управления. Ссылка dq компоненты текущего статора затем используется, чтобы получить необходимые сигналы логического элемента для инвертора через гистерезисную полосу текущий контроллер.
Основным преимуществом этого диска, по сравнению с управляемыми скаляром дисками, является свой быстрый динамический ответ. Свойственный эффект связи между крутящим моментом и потоком в машине управляем посредством разъединения (ориентация потока статора) управление, которое позволяет крутящему моменту и потоку управляться независимо. Однако из-за ее сложности расчета, реализация этого диска требует быстро вычислительных процессоров или DSPS.
Блок Five-Phase PM Synchronous Motor Drive обычно называется AC8 электропривод.
Блок Five-Phase PM Synchronous Motor Drive использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Контроллер скорости (AC)
Векторный контроллер (PMSM)
Шина DC
(Пятифазовый) инвертор
Система управления имеет два различного времени выборки: контроллер скорости время выборки и векторное время выборки контроллера.
Контроллер скорости время выборки должен быть кратным векторному времени выборки контроллера и кратному шагу времени симуляции. Модель инвертора среднего значения имеет более низкие постоянные времени, по сравнению с подробной моделью конвертера. Поэтому можно использовать более высокие шаги времени симуляции с этим типом модели. В течение векторного времени выборки контроллера 30 μs хорошие результаты симуляции были получены для шага времени симуляции 30 μs.
Шаг времени симуляции должен быть ниже, чем векторный временной шаг контроллера.
Токи статора id1*, iq2*, и id2* установлены в 0 внутренней части векторный блок контроллера с тех пор, только iq1 ток способствует, чтобы закрутить производство.
Выберите, как выходные переменные организованы. Если вы выбираете Multiple output buses (значение по умолчанию), блок имеет три отдельных выходных шины для двигателя, конвертера и переменных контроллера. Если вы выбираете Single output bus, все переменные выход на одной шине.
Выберите между Detailed (значение по умолчанию) и Average модели инвертора.
Выберите между Torque Tm (значение по умолчанию), Speed w, и mechanical rotational port как механический вход.
Когда вы выбираете Torque Tm, блок выводит частоту вращения двигателя согласно следующему дифференциальному уравнению, описывая механическую системную динамику:
Эта механическая система моделируется в блоке Synchronous Machine.
Когда вы выбираете Speed w как механический вход, блок выводит электромагнитный крутящий момент, позволяя вам смоделировать механическую системную динамику вне блока Five-Phase PM Synchronous Motor Drive. С этой установкой инерция и вязкие параметры трения не появляются в маске блока.
Когда вы выбираете mechanical rotational port, блок показывает порт подключения S, который значит механический ввод и вывод. Это позволяет прямую связь со средой Simscape™. Механическая система двигателя моделируется в диске и основана на том же дифференциальном уравнении.
Смотрите механическую связь двух электроприводов.
Когда вы устанавливаете этот флажок, Motorconv, и Ctrl измерение выходные параметры использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, выход использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink®.
Electrical parameters и разделы Mechanical parameters отображают параметры блока Synchronous Machine.
Раздел Rectifier вкладки Converters and DC bus отображает параметры Универсального Мостовой бруса.
Задайте емкость шины DC в фарадах. Значением по умолчанию является 2000e-6.
Задайте тормозящее сопротивление прерывателя в Омах. Используйте это сопротивление, чтобы избежать повышенного напряжения шины во время моторного замедления или когда крутящий момент загрузки будет иметь тенденцию ускорять двигатель. Значением по умолчанию является 8.
Задайте тормозящую частоту прерывателя в герц. Значением по умолчанию является 4000.
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела гистерезисной полосы. Значением по умолчанию является 320. Логика Гистерезиса Прерывателя фигуры показывает тормозящую логику гистерезиса прерывателя.
Задайте напряжение завершения работы в вольтах. Это значение является точкой, в которой закрывается динамическое торможение, когда напряжение на шине достигает нижнего предела гистерезисной полосы. Значением по умолчанию является 310. Логику гистерезиса прерывателя показывают в следующем рисунке.
Логика гистерезиса прерывателя
Раздел Inverter вкладки Converters and DC bus отображает параметры блока Universal Bridge, который включен в библиотеку Power Electronics библиотеки Fundamental Blocks.
Задайте частоту источника напряжения в герц. Значением по умолчанию является 60. Параметр Source frequency доступен только, когда параметр Model detail level устанавливается на Average.
Задайте сопротивление на состоянии устройств инвертора в Омах. Значением по умолчанию является 1e-3. Параметр On-state resistance доступен только, когда параметр Model detail level устанавливается на Average.
Задайте тип регулирования, Speed regulation (значение по умолчанию) или Torque regulation.
Откройте схему, показывающую скорость и векторную схематику контроллеров.
Укажите, что максимальное ускорение допускало двигатель в об/мин/с. Чрезмерно большое положительное значение может вызвать пониженное напряжение шины DC. Этот параметр используется только в режиме регулирования скорости. Значением по умолчанию является 1000.
Задайте максимальное изменение скорости, позволенной во время моторного замедления в об/мин/с. Чрезмерно большая отрицательная величина может вызвать повышенное напряжение шины DC. Этот параметр используется только в режиме регулирования скорости. Значением по умолчанию является -1000.
Задайте первый порядок измерения скорости частота среза фильтра lowpass в герц. Этот параметр используется только в режиме регулирования скорости. Значением по умолчанию является 250.
Задайте контроллер скорости время выборки в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 4*20e-6.
Задайте контроллер скорости пропорциональное усиление. Этот параметр используется только в режиме регулирования скорости. Значением по умолчанию является 0.5.
Задайте контроллер скорости интегральное усиление. Этот параметр используется только в режиме регулирования скорости. Значением по умолчанию является 40.
Укажите, что максимальный отрицательный крутящий момент, в ньютон-метрах, применился к двигателю векторным контроллером (N.m). Значением по умолчанию является -35.
Укажите, что максимальный положительный крутящий момент, в ньютон-метрах, применился к двигателю векторным контроллером. Значением по умолчанию является 35.
Задайте векторное время выборки контроллера в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 20e-6.
Задайте текущую гистерезисную пропускную способность в амперах. Значением по умолчанию является 0.1. Это значение является общей пропускной способностью, распределенной симметрично вокруг текущего сетбола. Следующий рисунок показывает случай, где текущий сетбол*, и текущая гистерезисная пропускная способность установлена в dx.
Этот параметр проигнорирован при использовании инвертора среднего значения.
Блок Rate Transition необходим, чтобы передать данные между различными уровнями выборки. Этот блок вызывает задержку сигналов логического элемента, таким образом, текущая сила превышает гистерезисную полосу.
Задайте максимальную частоту переключения инвертора в герц. Значением по умолчанию является 20e3. Этот параметр проигнорирован при использовании инвертора среднего значения.
SPВыводит сетбол крутящего момента или скорость. Сетбол скорости может быть ступенчатой функцией, но уровень изменения скорости следует за ускорением и пандусами замедления. Когда крутящий момент загрузки и скорость имеют противоположные знаки, ускоряющийся крутящий момент является суммой электромагнитных крутящих моментов и крутящих моментов загрузки.
Wm, Tm, или SМеханический вход диска: частота вращения двигателя (Wm), механический крутящий момент (TM) или порт вращательного механического устройства (S).
A, B, C Три терминала фазы электропривода.
Когда параметр Output bus mode устанавливается на Multiple output buses, блок имеет следующие три выходных шины:
MotorМоторный вектор измерения. Этот вектор позволяет вам наблюдать переменные двигателя с помощью блока Селектора Шины.
ConvПятифазовый вектор измерения конвертера. Этот вектор содержит:
Напряжение на шине DC
Выпрямитель текущий выход
Текущий вход инвертора
Можно визуализировать все текущие значения и значения напряжения мостов с помощью блока Multimeter.
CtrlВектор измерения контроллера. Этот вектор содержит:
Ссылка крутящего момента
Скоростная погрешность (различие между ссылкой скорости сползают и фактическая скорость),
Пандус ссылки скорости или ссылка крутящего момента
Когда параметр Output bus mode устанавливается на Single output bus, блок группирует Двигатель, Conv и Ctrl выходные параметры в одну шину выход.
Библиотека содержит набор параметра диска на 4,4 кВт. Таблица показывает спецификации диска на 4,4 кВт.
| Входное напряжение диска: | |
Амплитуда | 160 В (L-L) |
Частота | 60 Гц |
| Моторная номинальная стоимость: | |
Степень | 4,4 кВт |
Скорость | 900 об/мин |
Напряжение | 160 В (L-N) |
ac8_example модель показывает симуляцию блока Five-Phase PM Synchronous Motor Drive при стандартном условии загрузки. ac8_example_simplified модель показывает симуляцию модели среднего значения при тех же условиях загрузки.
[1] Bose, B. K. Современная силовая электроника и диски AC. Верхний Сэддл-Ривер, NJ: Prentice Hall, 2002.
[2] Краузе, P. C. Анализ электрического машинного оборудования. Нью-Йорк: McGraw-Hill, 1986.
[3] Toliyat, Х. А. Анэлизис и Симуляция Многофазных Дисков Асинхронного двигателя Переменной скорости При Асимметричных Связях. Прикладная Конференция по Силовой электронике и Выставка, Издание 2, 1996, стр 586–592.
[4] Beaudart, F., Ф. Лэбрик, Э. Матань, Д. Телтеукс и П. Александр. Управляйте при нормальной и отказоустойчивой работе многофазных синхронных машин SMPM с механически и магнитным способом разъединенные фазы. Международная конференция по вопросам Энергетики, энергии и Электрических Дисков, 2009, стр 461–466.
