Машина индукции течет наблюдатель для ориентированного на поле управления
Simscape / Электрический / Управление / Наблюдатели
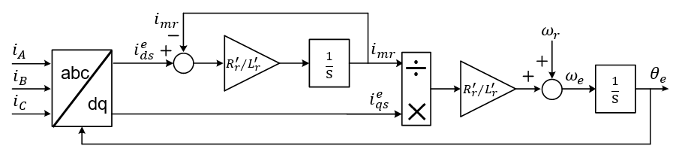
Блок Induction Machine Flux Observer получает синхронную скорость, ωe, и электрический угол, θe, которые требуются для выполнения ориентированного на поле управления (FOC) ротора. Рисунок показывает эквивалентную схему для наблюдателя.
Чтобы определить синхронную скорость и электрический угол, блок Induction Machine Flux Observer использует эти отношения:
и
в этих объединенных формах:
и
где:
d - поток ротора оси.
текущее намагничивание.
и d - ось и q - токи статора оси.
и d - ось и q - токи ротора оси.
синхронная скорость.
скорость вращательного механического устройства.
сопротивление ротора, упомянул сторону статора.
индуктивность утечки ротора, упомянул сторону статора.
индуктивность намагничивания.
[1] Сосуд, P. Электрические машины и диски: векторный пробелом подход теории. Нью-Йорк: Издательство Оксфордского университета, 1992.

